机构名称:
¥ 1.0
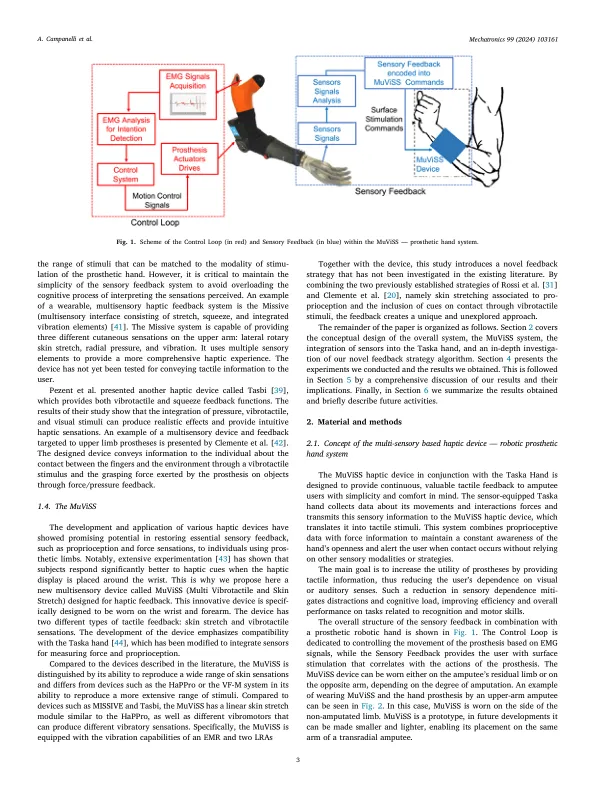
在上肢假肢领域,感觉反馈的结合对于认知过程和行为至关重要。研究表明,触觉反馈改善了截肢者对假体的控制。这项研究介绍了Muviss(多纤维状运动皮肤拉伸)触觉装置的发育,该触觉装置戴在手腕和前臂上,并从机器人假肢手中提供感觉运动反馈。提出了一种创新的反馈策略,该策略尚未在现有文献中探讨。通过结合两种已经建立的策略 - 即,与本体感受结合伸展皮肤并结合了联系 - 该研究提供了一种未开发的感觉反馈方法。改编对商业上可用的Taska假肢手,以集成传感器并捕获触觉反馈的数据。对非开拓者受试者进行的两类测试表现出了有希望的功效和性能。与五名参与者一起进行了一系列测试,旨在评估Muviss反馈的有效性,分别测试每个反馈。为了评估整个系统的有效性,还对九个受试者进行了测试,并控制了假肢。他们允许通过振动将Muviss反馈与经典的力量反馈进行比较,并且没有触觉反馈。结果表明,新的反馈解决方案能够在没有视力的情况下提供尺寸和刚度信息。此外,反馈改善了电动机任务的性能,特别是用视觉抓住大理石。研究表明,该系统有可能改善控制,提高性能并对操作假体设备的整体体验产生积极影响。
创新的多曲函式皮肤拉伸(Muviss ... -Iris
主要关键词


相关文件推荐