机构名称:
¥ 1.0
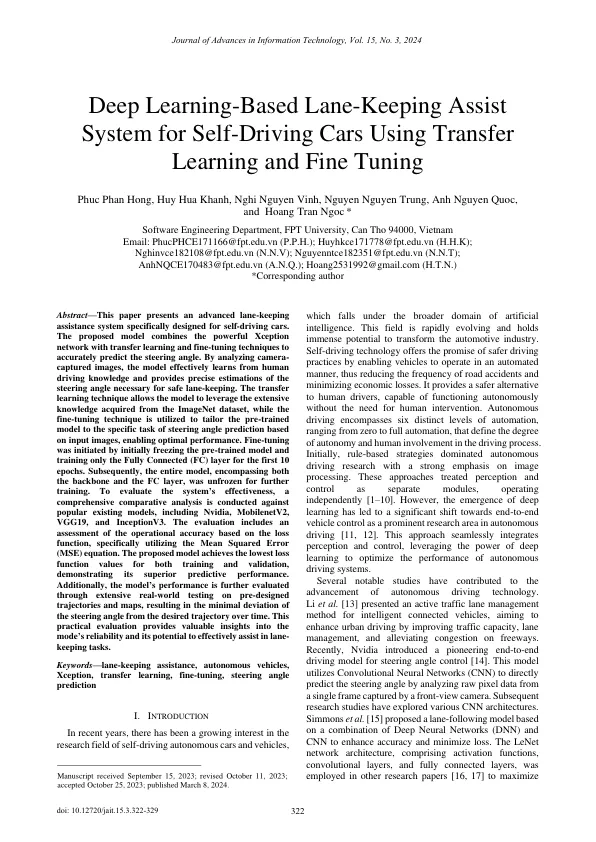
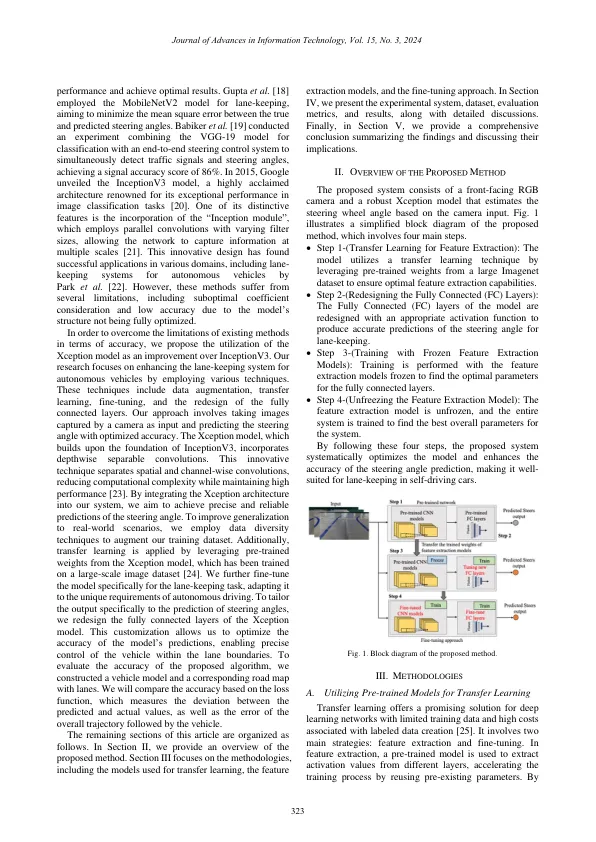
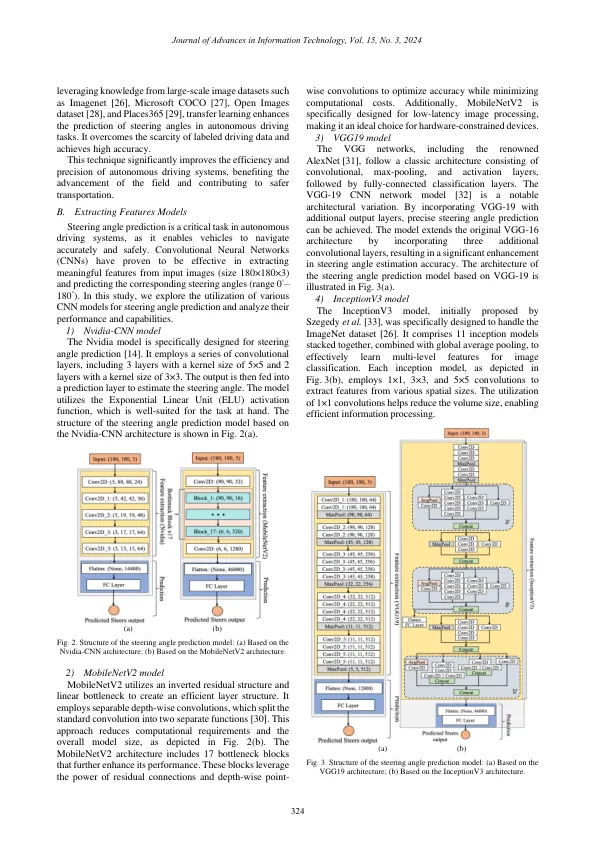
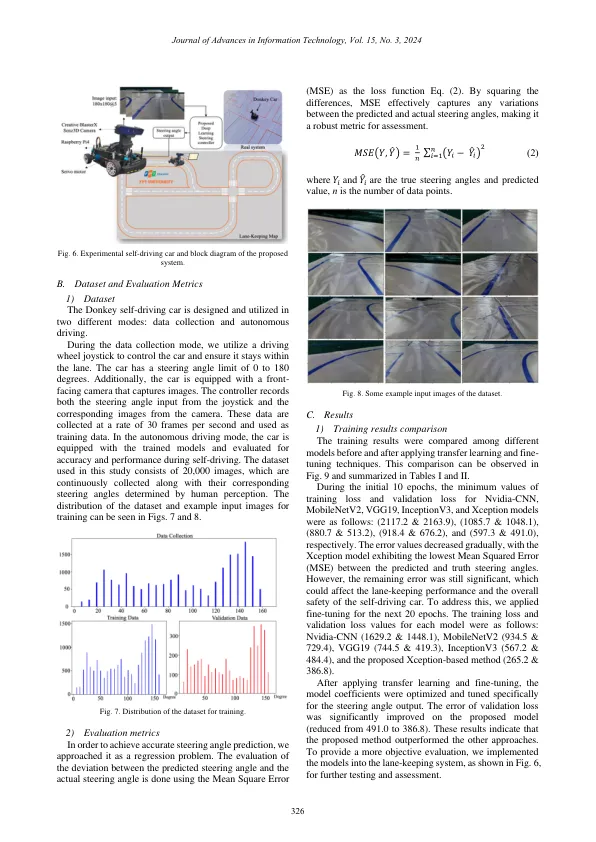
摘要 - 本文提出了专门为自动驾驶汽车设计的高级车道保管援助系统。提出的模型将强大的Xeption网络与转移学习和微调技术相结合,以准确预测转向角度。通过分析摄像机捕获的图像,该模型有效地从人类驾驶知识中学习,并提供了对安全车道保持所需的转向角度的精确估计。转移学习技术允许模型利用从Imagenet数据集获得的广泛知识,而微型调整技术则用于根据输入图像来指导角度预测的特定任务来定制预训练的模型,从而实现最佳性能。微调是通过最初冷冻预训练的模型并仅训练前10个时期的完全连接(FC)层来开始的。随后,整个模型涵盖了主链和FC层,以进行进一步的训练。为了评估系统的有效性,对包括NVIDIA,MOBILENETV2,VGG19和InceptionV3在内的流行现有模型进行了全面的比较分析。评估包括基于损耗函数的操作准确性的评估,特别是利用了平方误差(MSE)方程。所提出的模型实现了训练和验证的最低损耗函数值,证明了其出色的预测性能。这种实际评估提供了对模式的可靠性及其有效协助行驶任务的潜力的宝贵见解。此外,通过对预设计的轨迹和地图进行广泛的现实世界测试进一步评估了该模型的性能,从而导致转向角度远离所需轨迹的最小偏差。关键字 - 行长辅助,自动驾驶汽车,X CEPTION,转移学习,微调,转向角度预测
基于学习的深度巷道维护辅助系统...
主要关键词

相关文件推荐