机构名称:
¥ 1.0
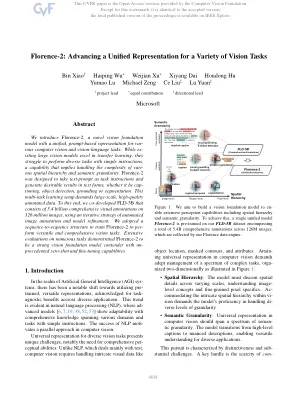
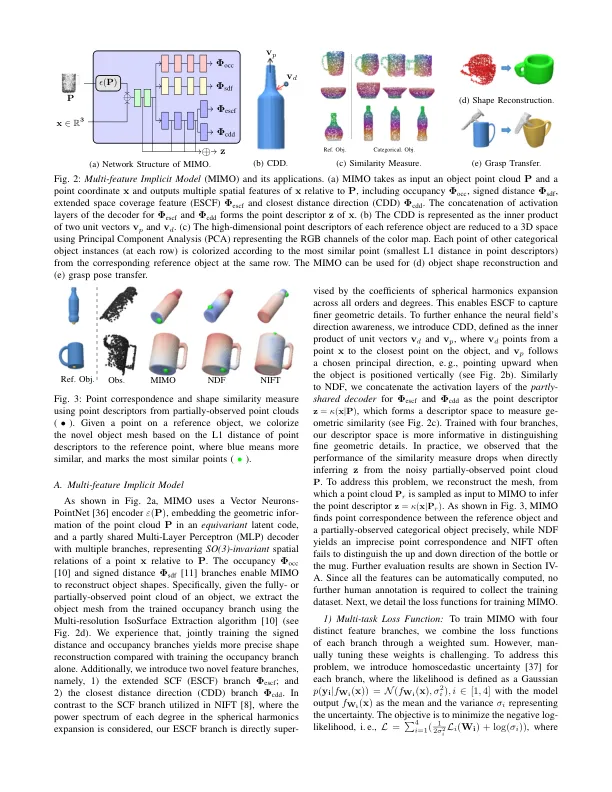
摘要 - 面向任务的对象抓握和重排是机器人的关键技能,必须执行多功能的现实世界操纵任务。然而,由于对物体的部分观察并形成了分类对象的变化,它们仍然具有挑战性。在本文中,我们介绍了多元特征隐式模型(MIMO),这是一种新颖的对象表示,在隐式神经场中编码点和对象之间的多个空间特征。在多个特征上训练这样的模型可确保其始终如一地嵌入对象形状,从而改善其在对象形状中的性能,从部分观察,形状相似性度量和对象之间的空间关系进行建模。基于MIMO,我们提出了一个框架,以从单个或多个人类演示视频中学习面向任务的对象抓握和重排。仿真中的评估表明,我们的方法的表现优于多和单视图观察的最新方法。现实世界实验证明了我们方法在对操纵任务的单次模仿学习中的功效。
视觉模仿以任务为导向的对象抓握和重新排列
主要关键词



相关文件推荐