机构名称:
¥ 1.0
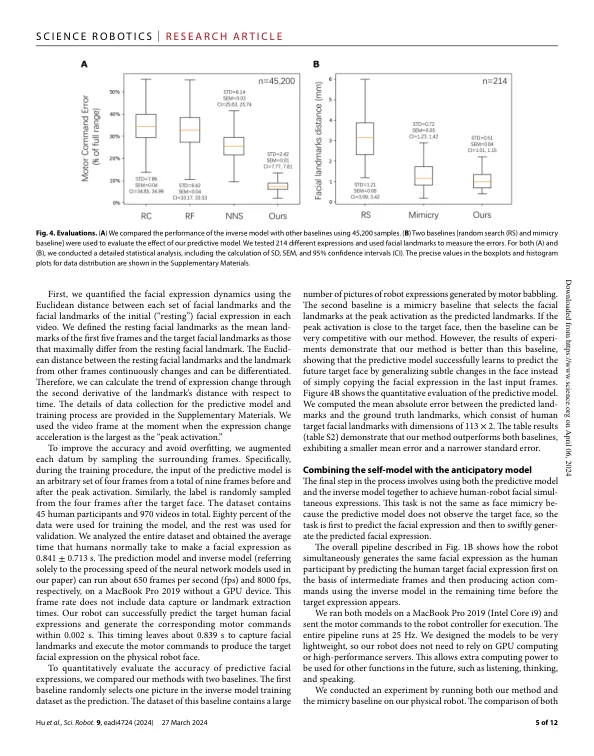
大型语言模型正在实现机器人口头交流的快速进步,但是非语言通讯并不能保持步伐。物理类人形机器人努力使用面部运动来表达和交流,主要依靠声音。挑战是双重的:首先,一种表达的机器人面孔的致动在机械上具有挑战性。第二个挑战是知道要产生什么表达,以使机器人看起来自然,及时和真实。在这里,我们建议通过训练机器人来预测未来的面部表情并与人同时执行它们,从而可以缓解这两个障碍。虽然延迟的面部模仿看起来不明显,但面部共表达感觉更为真实,因为它需要正确推断人的情绪状态才能及时执行。我们发现,机器人可以学会在人类的微笑之前预测即将到来的微笑,并在人类的笑容面前预测,并使用学习的逆向运动面部自我模型,同时与人同时同时表达微笑。我们使用包含26个自由度的机器人脸证明了这种能力。我们认为,同时表达面部表情的能力可以改善人类机器人的相互作用。
人类机器人面部共表达
主要关键词




相关文件推荐