
机构名称:
¥ 1.0
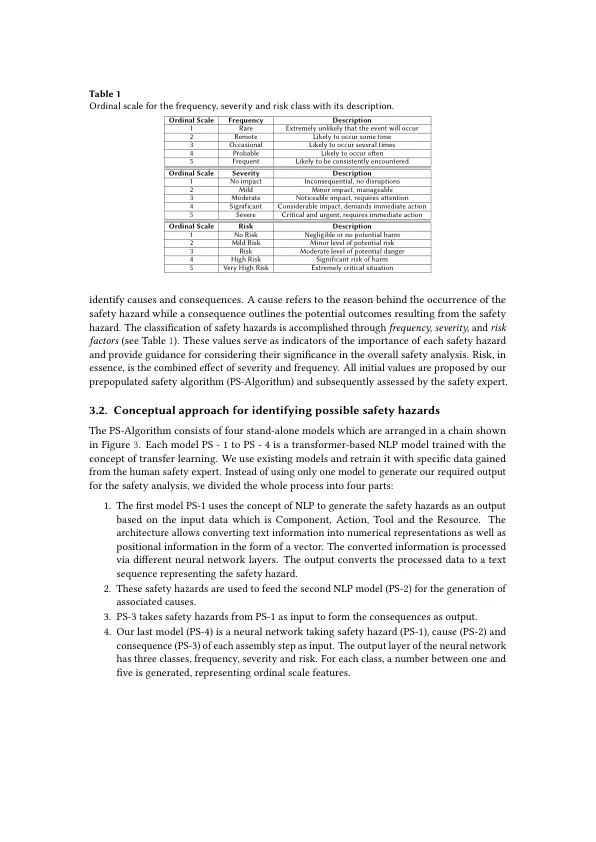
摘要在人类机器人协作(HRC)中,机器人在共享环境中与人的身体互动,而没有传统机器人系统中使用的典型障碍或保护笼,因此,必须将安全措施视为组装序列计划(ASP)的重要组成部分。在HRC中,此过程是复杂且耗时的,尤其是在确保没有安全危害的情况下。本文报告了第一个结果,其中显示了如何将人类机器人ASP安全性分析过程进行半自动化过程的概念。我们的概念集成了基于变压器的自然语言处理NLP模型,以自动产生有关潜在安全危害的建议,它们对每个组装步骤的原因和后果。人类安全专家审查了预先填充的信息,并通过仪表板结合了补充安全考虑。初步结果表明,专家在制定安全措施方面的手动努力大大减少。
朝着人类机器人协作的概念安全计划框架
主要关键词




相关文件推荐





























