机构名称:
¥ 1.0
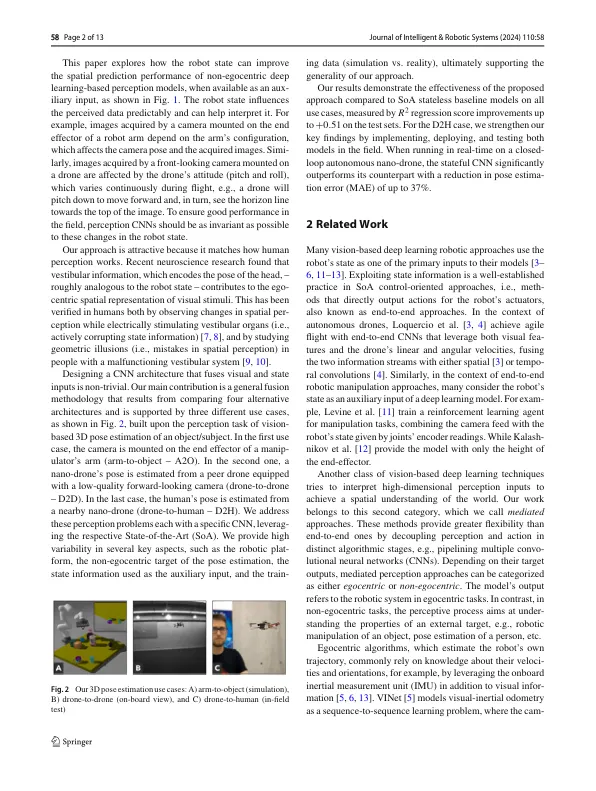
基于抽象视觉的Deeplearningceptionful Fillsaparamountroleinrobotics,促进stomitatingstolutionStomanyChallengingScenarios,例如自动无人驾驶汽车(无人机)的杂技演习和机器人辅助的高级手术。以控制为导向的端到端感知方法直接输出机器人控制变量,通常将机器人的状态估计作为辅助输入。当中间输出被估算并馈送到较低级别的控制器时,即介导的方法时,机器人的状态通常仅作为以Egipentric任务的输入来估计机器人本身的物理特性。在这项工作中,我们建议第一次(据我们所知)将类似的方法应用于非中心介导的任务,其中估计的输出指的是外部主题。我们证明了我们的一般方法论如何改善深度卷积神经网络(CNN)对广泛的非中心3D姿势估计问题的回归性能,并且计算成本最少。通过分析三种高度不同的用例,从用机器人臂抓住到具有袖珍无人机的人类受试者,我们的结果始终提高r 2回归度量,与他们的无状态基线相比,我们的结果始终提高+0.51。最后,我们验证了人类姿势估计任务上闭环自动cm级无人机的内部性能。我们的结果表明,与最先进的无状态同行相比,我们的状态CNN的平均绝对误差平均减少了,即平均24%。
改善自主机器人技术的深神经网络
主要关键词



相关文件推荐












![自我维护[网络]系统:数据中心机器人技术的兴起!](/simg/a/a74ab1a85a20373b202d691350e9cb8b98180239.webp)