机构名称:
¥ 1.0
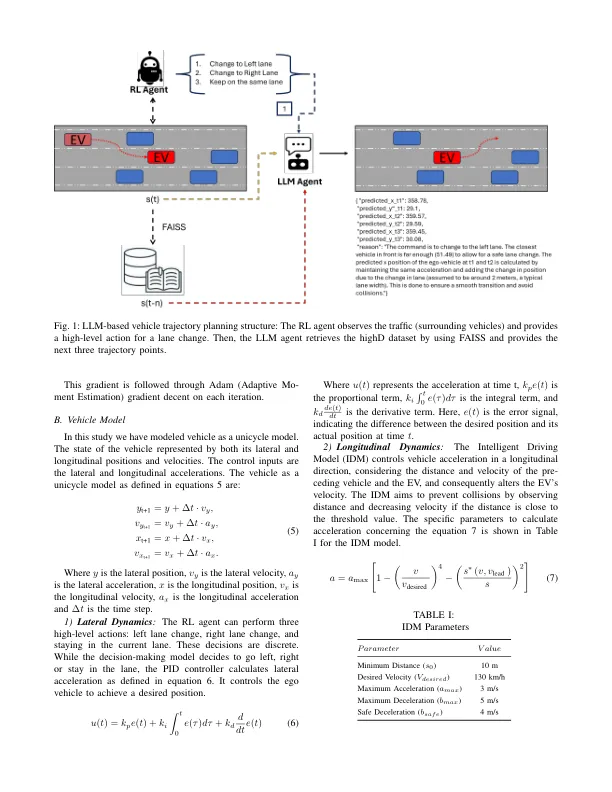
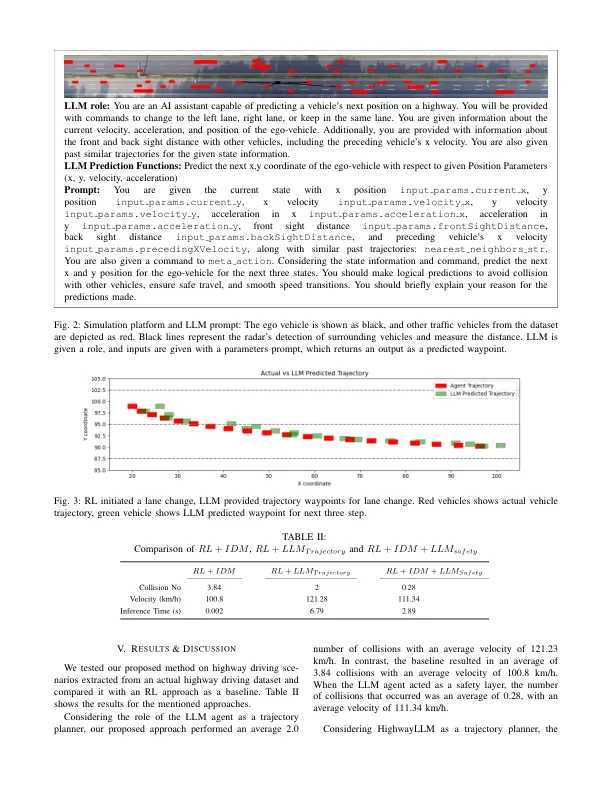
摘要 - 自主驾驶是一项复杂的任务,需要高级决策和控制算法。了解自动驾驶汽车决定背后的基本原理对于确保其在高速公路驾驶中安全有效的操作至关重要。这项研究提出了一种新颖的方法,即Highwayllm,它利用了大语言模型(LLMS)的推理能力,以预测Ego-Vehicle导航的未来路点。我们的方法还利用预先训练的强化学习(RL)模型作为高级计划者,对适当的元级行动做出决定。Highwayllm结合了RL模型的输出和当前状态信息,以对下一个状态进行安全,无碰撞和可解释的预测,从而为自我车辆构建轨迹。随后,基于PID的控制器将车辆引导到LLM代理预测的航路点。LLM与RL和PID的集成增强了决策过程,并为高速公路自动驾驶提供了解释性。
高速公路:使用RL信息模型
主要关键词



相关文件推荐