机构名称:
¥ 1.0
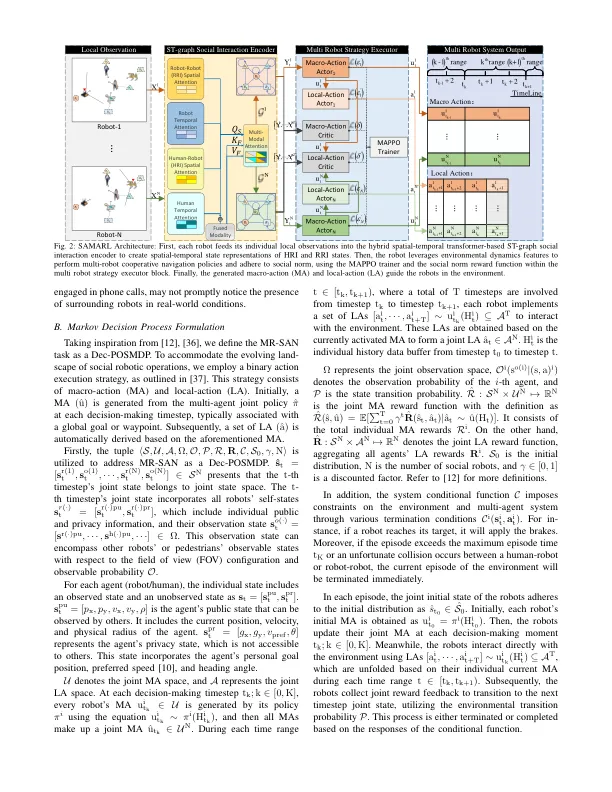
摘要 - 在与人类共享的公共空间中,确保多机器人系统在没有冲突的情况下导航,而尊重社会规范是具有挑战性的,尤其是在有限的社区中。尽管当前的机器人社会导航技术利用了强化学习和深度学习的进步,但它们经常忽略模拟中的机器人动态,从而导致模拟对真实差距。在本文中,我们通过介绍一个使用DEC-POSMDP和多机构增强学习制作的新的多机器人社会导航环境来弥合这一差距。此外,我们介绍了Samarl:合作多机器人社会导航的新颖台。samarl采用独特的时空变压器与多机构增强学习结合。这种方法有效地捕获了机器人与人之间的复杂相互作用,从而促进了多机器人系统中的合作倾向。我们的广泛实验表明,在我们设计的环境中,萨玛尔的表现优于现有的基线和消融模型。这项工作的演示视频可以在以下网址找到:https://sites.google.com/view/samarl
使用多机构强化学习
主要关键词




相关文件推荐