机构名称:
¥ 1.0
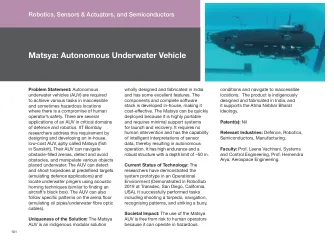
摘要 - 现代自动化驾驶解决方案利用少量的计划和控制组件,其中需要对不同的驾驶情况和车辆类型进行调整,以实现最佳性能。本文提出了一种自动调整此类参数的方法,以重新进行专家演示。我们利用一个成本函数,该成本函数捕获了控制器与记录所需驾驶行为的闭环操作的偏差。参数调整。在一个案例研究中比较了三种优化替代方案,在案例研究中,在现实世界驾驶的情况下,轨迹规划师为车道调整了轨道。结果表明,即使在嘈杂的演示数据方面,提出的方法也可以显着改善手动调整的初始参数。
自动驾驶车辆的自动参数调整
主要关键词





相关文件推荐