机构名称:
¥ 1.0
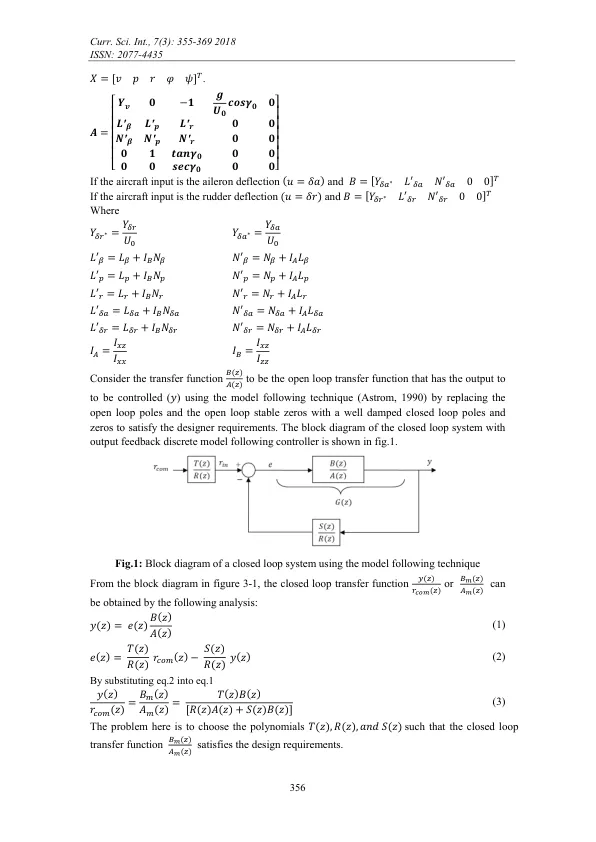
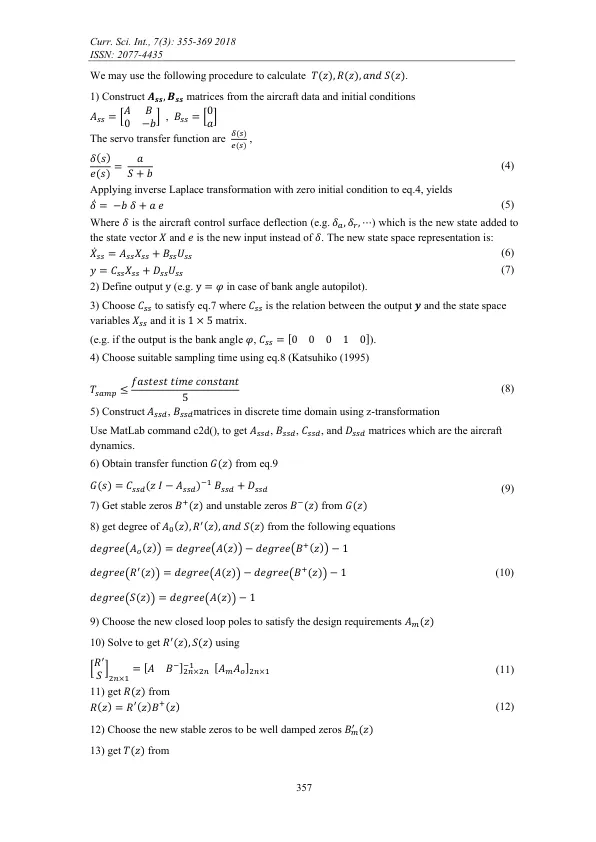
简介 许多方法已用于设计飞机自动驾驶仪。Taha 等人。(2009) 状态反馈、极点配置、滞后控制器和模型参考自适应控制技术已用于爬升率自动驾驶仪的设计。No 等人。(2006) 经典根轨迹和波特频率法用于设计高度稳定、速度和飞行路径角自动驾驶仪。此外,零努力脱靶概念也被有效用于提出适用于任意轨迹跟踪控制问题的制导律。在所提出的制导方案中,命令以速度、飞行路径和航向角的形式给出,以便它们可以轻松地与现有的控制配置相匹配,Giampiero 等人。(2007) 编队控制的设计基于内环和外环结构。平面外环制导律采用反馈线性化设计,而垂直通道的外环采用补偿器设计。内环线性控制器也是使用经典补偿方法设计的,Taha 等人。(2009) 设计了一个监督控制系统来管理不同自动驾驶仪的接合和脱离,并将命令输入传递给它们,使飞机实现所需的轨迹。在本文中,使用离散时间的模型跟踪技术设计了不同的自动驾驶仪。选择这些自动驾驶仪是为了将它们用于制导系统,以促使飞机在横向规划中实现特定的飞行路径。这些自动驾驶仪包括倾斜角、航向和水平环路自动驾驶仪。每个自动驾驶仪都将在飞机非线性模拟程序 (Brain, 1992) 上进行模拟,以说明飞机的响应并检查其实现平稳和可接受的机动的能力。本文使用了飞行条件 3 下的 Delta Aircraft 数据 (Etkin, 1982)。自动驾驶仪设计程序
使用离散模型跟随的横向自动驾驶仪设计...
主要关键词



相关文件推荐