机构名称:
¥ 1.0
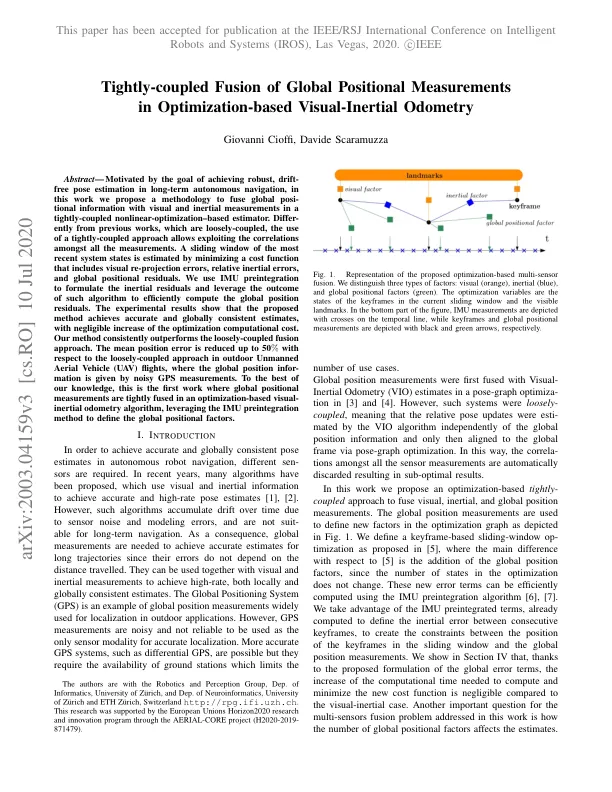
摘要 — 为了实现长期自主导航中稳健、无漂移的位姿估计,我们在本文中提出了一种将全局位置信息与视觉和惯性测量融合在一起的紧耦合非线性优化估计器。与以前的松散耦合的工作不同,使用紧耦合方法可以利用所有测量之间的相关性。通过最小化包括视觉重新投影误差、相对惯性误差和全局位置残差的成本函数来估计最新系统状态的滑动窗口。我们使用 IMU 预积分来计算惯性残差,并利用该算法的结果有效地计算全局位置残差。实验结果表明,所提出的方法实现了准确且全局一致的估计,而优化计算成本的增加可以忽略不计。我们的方法始终优于松耦合的融合方法。与室外无人机 (UAV) 飞行中的松散耦合方法相比,平均位置误差减少了 50%,其中全局位置信息由嘈杂的 GPS 测量提供。据我们所知,这是首次在基于优化的视觉惯性里程计算法中紧密融合全局位置测量,利用 IMU 预积分方法定义全局位置因子。
基于优化的视觉惯性里程计中的全局位置测量紧耦合融合
主要关键词


相关文件推荐