
机构名称:
¥ 1.0
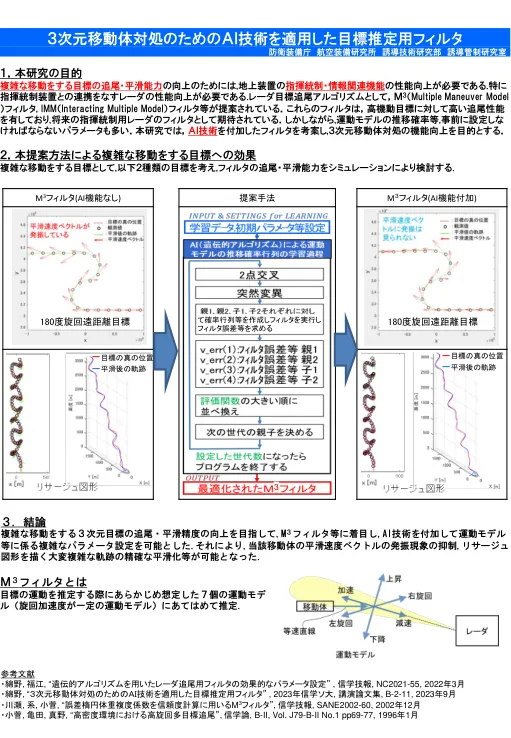
1.研究目的:为了提高复杂运动目标的跟踪和平滑能力,需要提高地面设备的指挥控制和信息相关功能的性能。特别是需要提高与指挥控制设备配合使用的雷达的性能。作为雷达目标跟踪算法,已经提出了M3(多机动模型)滤波器、IMM(交互多模型)滤波器等。该类滤波器对高机动目标有较高的跟踪性能,有望作为未来指挥控制雷达的滤波器。然而,有许多参数必须提前设置,例如运动模型的转移概率。在本研究中,我们设计了一种融入人工智能技术的过滤器,旨在提高处理三维运动物体的能力。
利用人工智能技术对 3D 运动物体进行目标估计滤波
主要关键词
相关文件推荐
![利用人工智能(AI)技术与电磁学进行优化设计 [I]](/simg/e/e2b202296b0567a88b2efb733a168494aa2a8937.png)




























