机构名称:
¥ 1.0
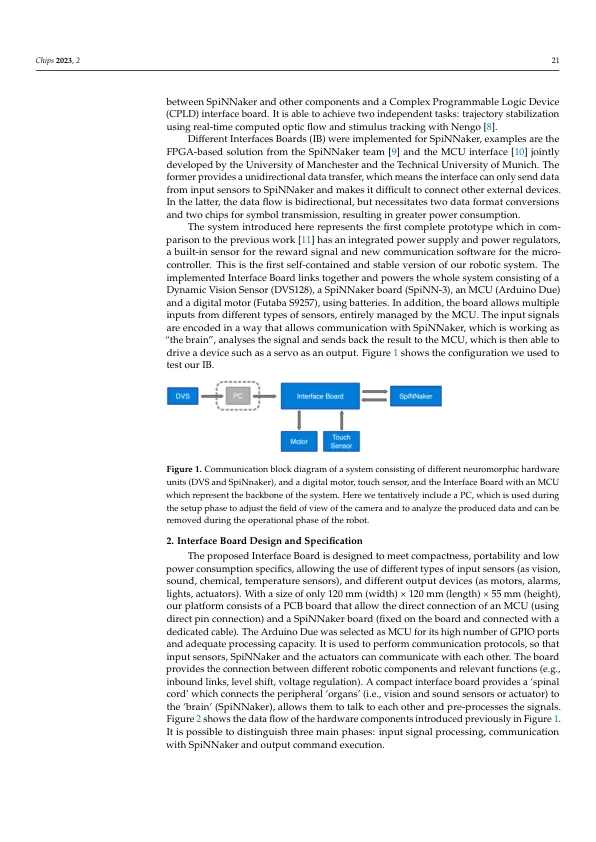
摘要:神经形态计算有望成为低功率AI应用中的未来标准。新的神经形态硬件与传统微控制器之间的集成是一个开放的挑战。在本文中,我们提出了一个接口板和一个通信协议,该协议允许使用中间的微控制器单元(Arduino Push)在不同设备之间进行通信。我们的紧凑型印刷电路板(PCB)将不同的设备链接到整个系统,并使用电池作为电源为整个系统提供电源。具体而言,我们已经连接了一个动态视觉传感器(DVS128),大三角器板和伺服电动机,为由尖峰神经网络控制的神经形态机器人系统创建了平台,该平台在拦截传入对象的任务上证明了这一点。实现的接口板的数据速率为24.64 K符号/s,生成命令的延迟约为11ms。完整的系统仅由电池运行,非常适合机器人应用。
机器人神经形态系统的接口平台
主要关键词

相关文件推荐