机构名称:
¥ 1.0
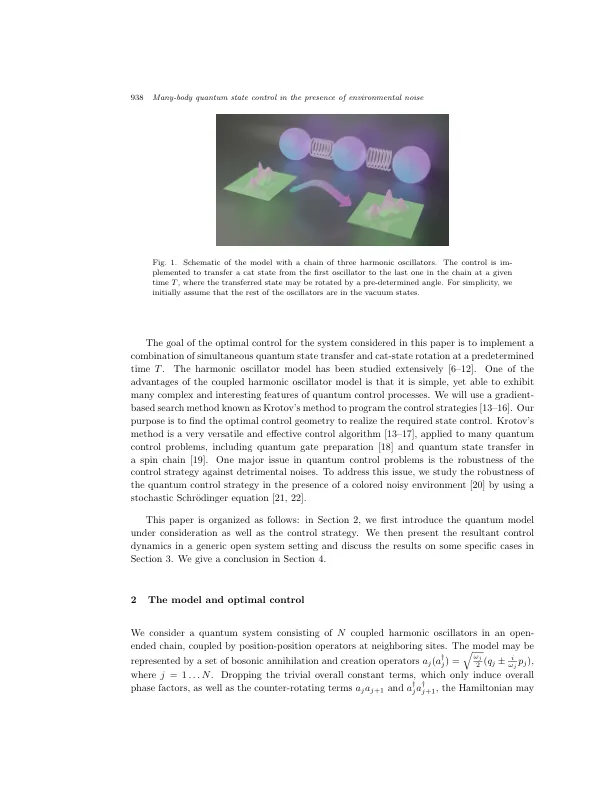
量子态控制对于量子信息处理和通过量子网络传输量子信息至关重要。在本文中,我们研究如何通过设计描述系统内部几何形状或配置的时间相关物理参数来控制多体量子系统的时间演化。一个有趣的经典类比是,一只坠落的猫可以重新调整自己的方向,以便它四脚着地,最大限度地减少对身体的伤害[1-4]。这种经典现象的可控性与这样一个事实有关:猫不是刚体[5],但可以改变身体的形状和身体各部分的相对方向,使它能够在不违反角动量守恒定律的情况下旋转。在量子领域,自主控制问题可能变得更加复杂,因为量子变形体并不是一个经过充分研究的、能够轻易表现出量子控制特性的平台。为了说明我们的方法,我们考虑一个由耦合谐振子链组成的量子系统,我们将使用它来展示在给定的控制运行时间内通过改变耦合和频率来实现量子猫态的传输和重新定位。
在存在的情况下进行多体量子态控制......
主要关键词




相关文件推荐