机构名称:
¥ 1.0
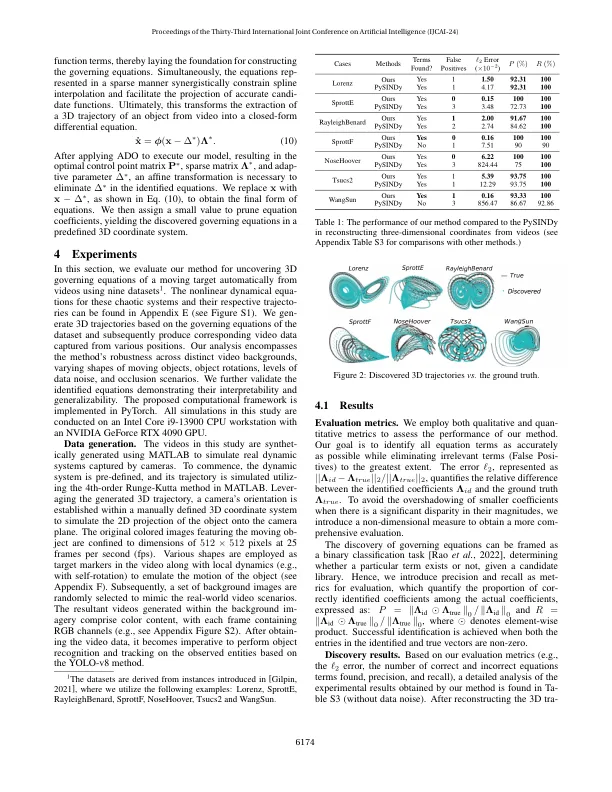
数据驱动的理事方程发现在许多科学和工程领域都引起了重大利益。现有的研究主要集中于基于系统状态的直接测量(例如轨迹)的直接测量来揭示非线性dynamics的方程。有限的努力是针对从视频中蒸馏出的,即在3D空间中移动目标的视频。为此,我们提出了一种基于视觉的方法,可以通过一组摄像机记录的原始视频自动发现3D移动目标的非线性动力学方程。该方法由三个关键块组成:(1)一个目标跟踪模块,该模块在每个视频中提取移动目标的平面像素运动动作,(2)Rodrigues的基于旋转公式的坐标转换模块,该模块重建了3D坐标,该模块与预测的参考点和(3)基于图书馆的范围相关的3D坐标,该模块是spress-Encress-Encress-nuff the Spress-Encress of gress of gress of gress of gress of gress of sprys of gress of sprys of gress nuff spression of gress of gress of。动力学。此框架能够有效地处理与介绍数据相关的挑战,例如,视频中的噪声,不精确的跟踪导致数据缺失的目标等。通过多组综合视频考虑了不同的非线性动力学,我们的方法的功效已经证明了。
基于视觉的3D移动目标的非线性动力学发现
主要关键词




相关文件推荐