机构名称:
¥ 1.0
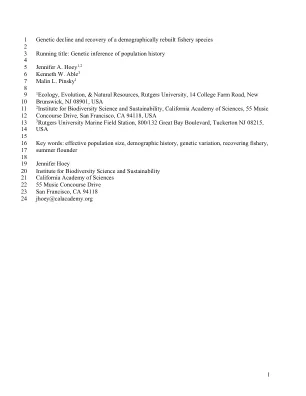
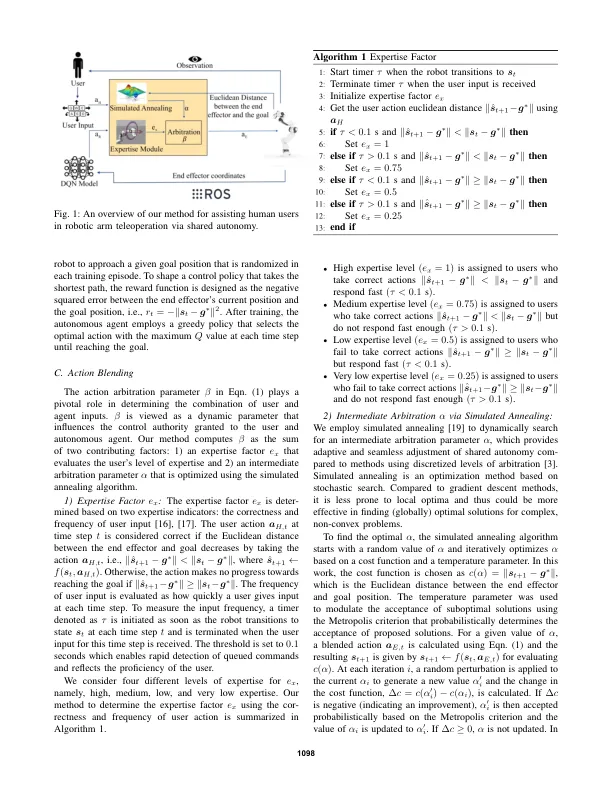
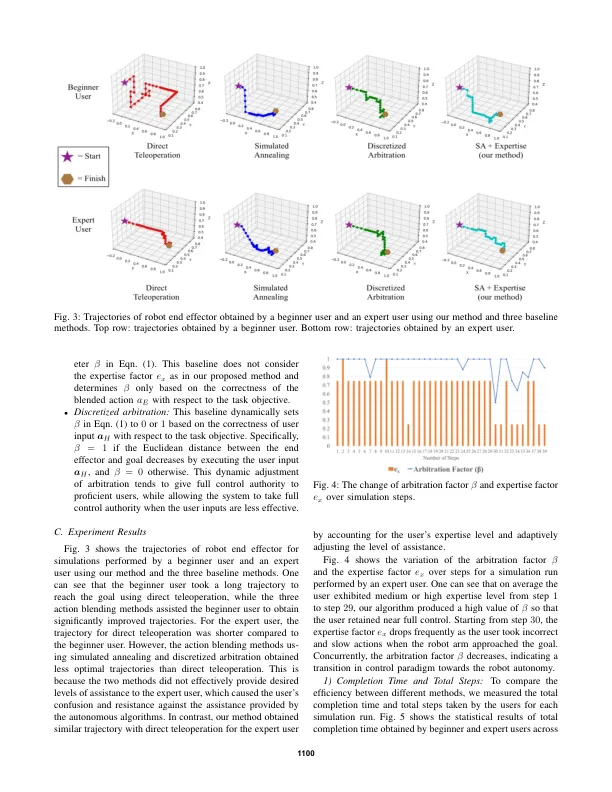
摘要 - 共享自主权是一种机器人控制方法,可帮助人类用户实现其预期目标,同时利用机器人自主权的精确和效率。在共享的自主权中,用户输入和自主帮助合并以有效控制机器人,而无需用户提供直接和精确的控制输入。共享自主权中的一个持续问题是如何确定用户输入和自主算法之间的仲裁。由于用户所需的帮助量的可变性,必须通过考虑用户的偏好,物理能力和专业知识来开发以用户为中心的算法来提供定制和自适应帮助。在本文中,我们提出了一种共享的自主方法,该方法在用户的任务绩效和专业水平中都可以自适应地调整运行时的帮助量。我们在辅助控制问题中验证了我们的方法,在该问题中,人用户在模拟的环境中对机器人臂进行了操作,以执行对象到达和掌握任务。结果表明,与直接近距离和仅考虑与任务相关的指标的两种基线仲裁方法相比,我们的方法协助用户实现更高的效率来完成对象到达和掌握任务。
通过自适应共享自主权辅助控制机器人武器
主要关键词



相关文件推荐