机构名称:
¥ 2.0
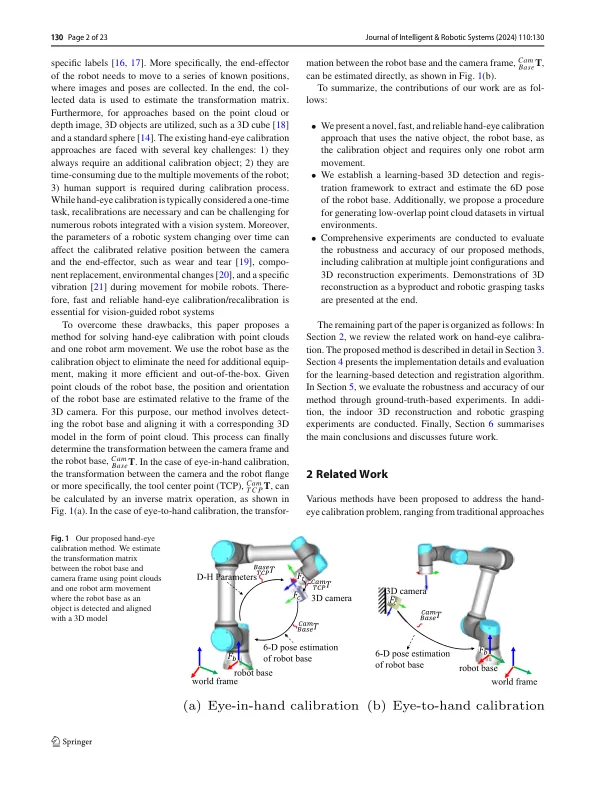
抽象的手眼校准是基于视觉机器人系统的基本任务,通常配备协作机器人,尤其是对于中小型企业(中小型企业)的机器人应用。大多数手眼校准方法都取决于外部标记或人类援助。我们提出了一种新的方法,该方法可以使用机器人基础作为参考来解决手眼校准问题,从而消除了对外部校准对象或人类干预的需求。使用机器人底座的点云,从相机的坐标框架到机器人底座的转换矩阵被确定为“ i = axb”。为此,我们利用基于学习的3D检测和注册算法来估计机器人基础的位置和方向。该方法的鲁棒性和准确性是通过基于基础真实性的评估来量化的,并且将精度结果与其他基于3D视觉的校准方法进行了比较。为了评估我们的方法论的可行性,我们在不同的关节构造和实验组中使用了低成本结构化的轻扫描仪进行了实验。根据实验结果,提出的手眼校准方法达到了0.930 mm的翻译偏差,旋转偏差为0.265度。此外,3D重建实验表明旋转误差为0.994度,位置误差为1.697 mm。此外,我们的方法提供了在1秒内完成的潜力,这是与其他3D手眼校准方法相比最快的。相关代码在https://github.com/leihui6/lrbo上发布。我们根据手眼校准方法进行室内3D重建和机器人抓握实验。
自动机器人手眼校准通过基于学习的3D Vision
主要关键词

相关文件推荐