机构名称:
¥ 1.0
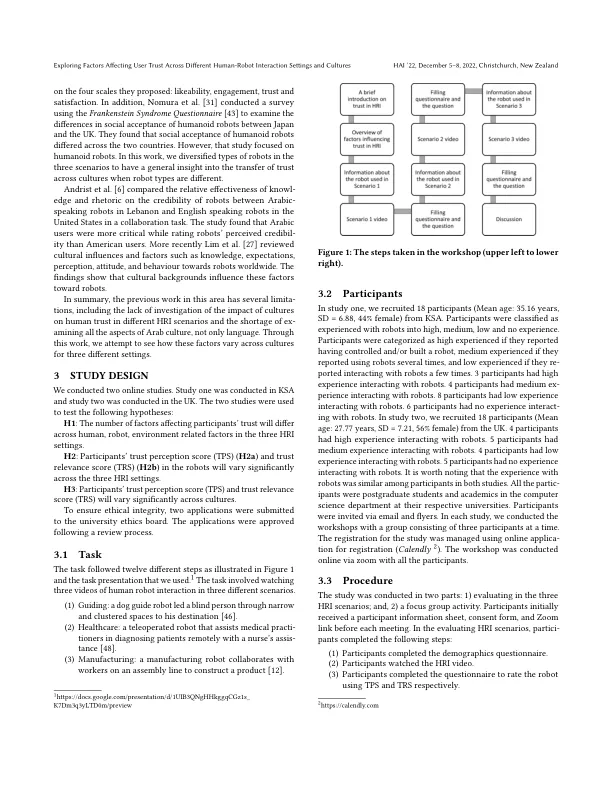
信任是建立成功的人类机器人互动(HRI)的必要因素之一。本文调查了人类对机器人的信任在两种文化中如何在HRI场景中有何不同。我们在两个国家进行了两项研究:沙特阿拉伯(研究1)和英国(研究2)。每项研究均介绍了三种HRI场景:一个狗机器人引导人们视力障碍,医疗保健中的遥控机器人和制造机器人。研究1表明,参与者的信任感知评分(TPS)在三种情况下都显着不同。然而,研究2结果表明,整个情况下TPS的变化略有显着变化。我们还发现,信任与给定任务的相关性是参与者信任的指标。此外,研究结果表明,影响用户信任的信任得分或因素在各种文化之间各不相同。发现发现可能影响人类信任的新因素,例如可控性,可用性和风险。调查结果指示HRI社区考虑一种动态而不断发展的设计,以实现人类机器人信任,因为影响人类信任的因素正在发展,并且会在不同的环境和文化中有所不同。
探索影响不同人类用户信任的因素...
主要关键词




相关文件推荐