机构名称:
¥ 1.0
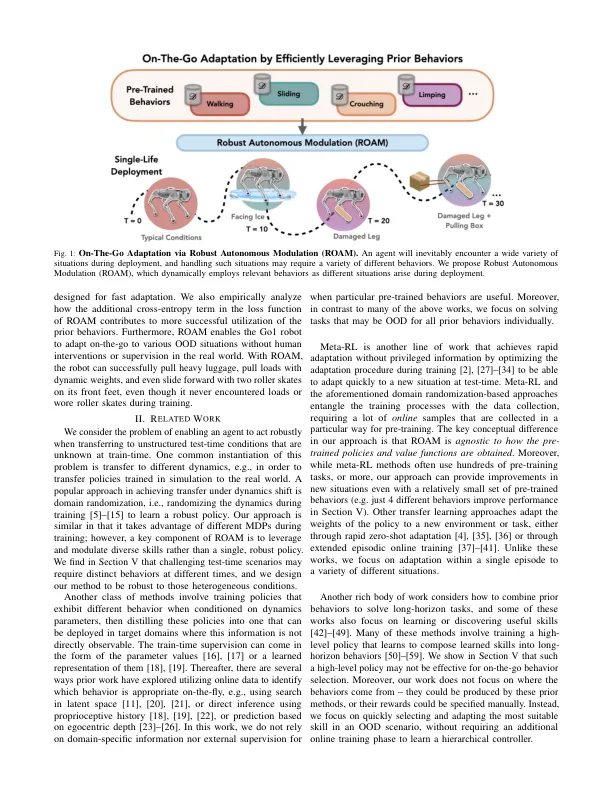
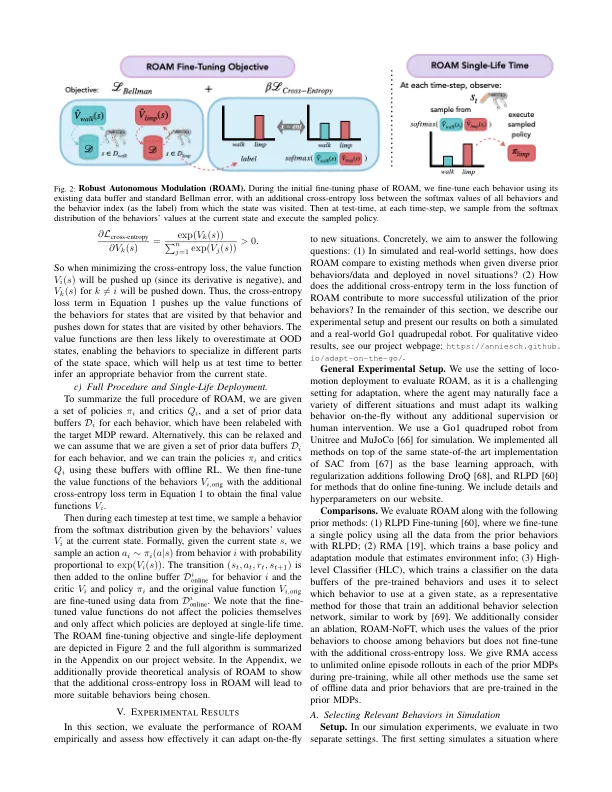
摘要 - 为了在现实世界中取得成功,机器人必须应对与训练过程中看到的情况不同的情况。我们通过利用以前学过的行为的多样化的曲目来研究部署期间在部署过程中适应这种新型情况的问题。我们的方法,强大的自主调制(ROAM),基于预先训练的行为的感知价值,以选择和适应手头情况的情况。至关重要的是,这种适应过程全部发生在测试时间的单个情节中,而无需任何人类监督。我们证明,漫游使机器人能够迅速适应模拟和真正的GO1四倍的动力学变化,甚至成功地以鞋底上的滚筒溜冰鞋成功地前进。通过有效选择和适应相关行为,我们的方法与现有方法相比,与现有方法相比,与现有方法相比,与现有方法相比,适应于2倍以上。
单人物机器人部署的行为调制
主要关键词


相关文件推荐