机构名称:
¥ 1.0
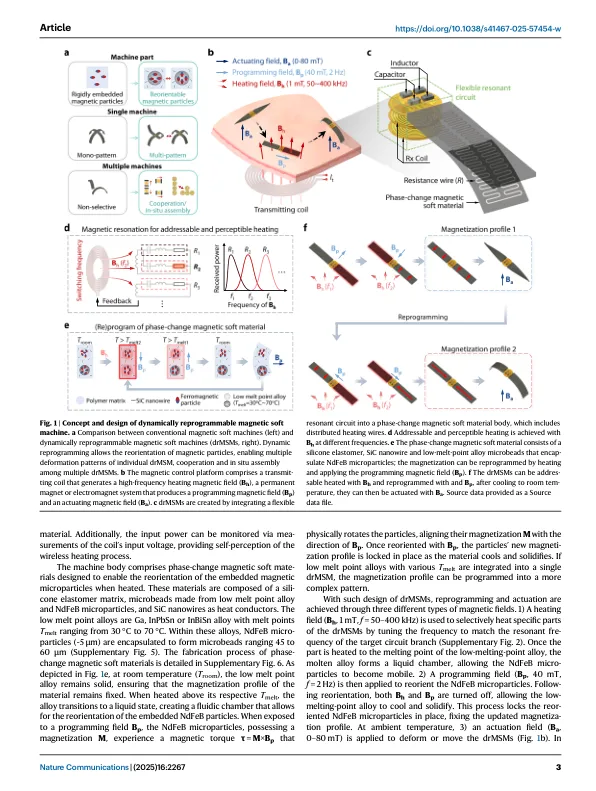
由外部磁场造成的软机器因其与生物体和复杂环境相互作用的潜力而引起了显着关注。但是,它们的适应性和功能通常受到操作过程中刚性磁化的限制。在这项工作中,我们在操作过程中引入了动态可重编程的磁性软计算机,并通过各种磁场的协同作用在操作过程中进行原位重新确定的磁化功率。可振荡的谐振电路集成到机体中,从而通过不同频率的高频频率实现了对特定区域的可寻址和可感知的加热。机身由由低熔点合金和NDFEB微粒制成的微型头。加热时,合金液体会固定,允许在40吨脉冲编程场下旋转NDFEB微粒。冷却后,新的配置被锁定在适当的位置。此重编程过程对于单个或多台机器同样有效,从而实现了多种机器的多种模式变形和多个机器的合作。此外,通过结合可寻址的热致动,我们将示意多个机器人的原位组装。这项工作可能使具有增强功能的磁性软计算机可以实现。
铁磁软计算机的可寻址和可感知的动态重编程
主要关键词




相关文件推荐