机构名称:
¥ 1.0
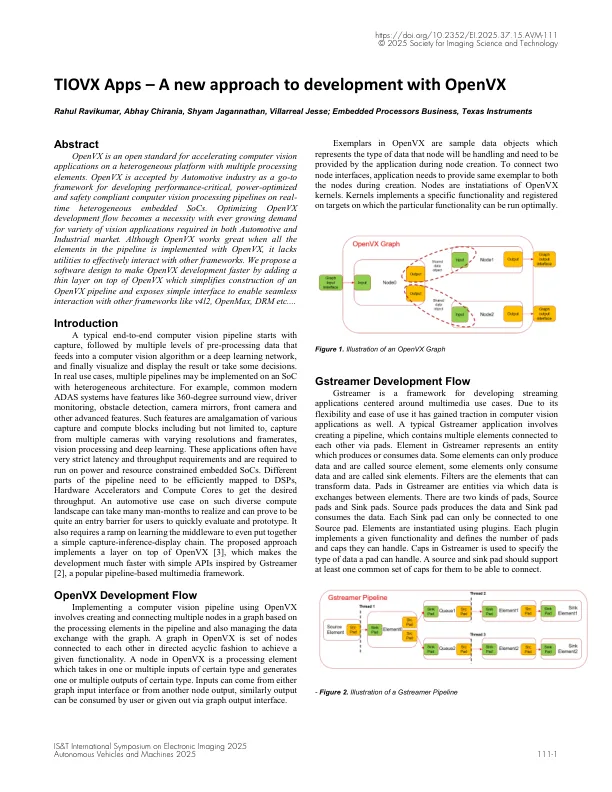
典型的端到端计算机视觉管道从捕获开始,然后是多个级别的预处理数据,这些数据将输入计算机视觉算法或深度学习网络,最后可视化并显示结果或做出一些决定。在实际用例中,可以在具有异质体系结构的SOC上实现多个管道。例如,常见的现代ADAS系统具有360度环绕视图,驾驶员监视,障碍物检测,摄像头,前置摄像头和其他高级功能。这样的特征是各种捕获和计算块的合并,包括但不限于从具有不同分辨率和帧速率的多个相机,视觉处理和深度学习的捕获。这些应用程序通常具有非常严格的延迟和吞吐量要求,并且需要在功率和资源约束的嵌入式SOC上运行。管道的不同部分需要有效地映射到DSP,硬件加速器和计算内核,以获取所需的吞吐量。在如此多样化的计算景观上的汽车用例可能需要许多人来实现,并且可以证明是用户快速评估和原型的入口障碍。还需要学习中间件的坡道,甚至可以整理一个简单的捕获推动键链。所提出的方法实现了OpenVX [3]顶部的一层,这使得开发更快,受到GSTREAMER启发的简单API [2],这是一种流行的基于管道的多媒体框架。
TIOVX应用程序 - 一种使用OpenVX
主要关键词


相关文件推荐