机构名称:
¥ 1.0
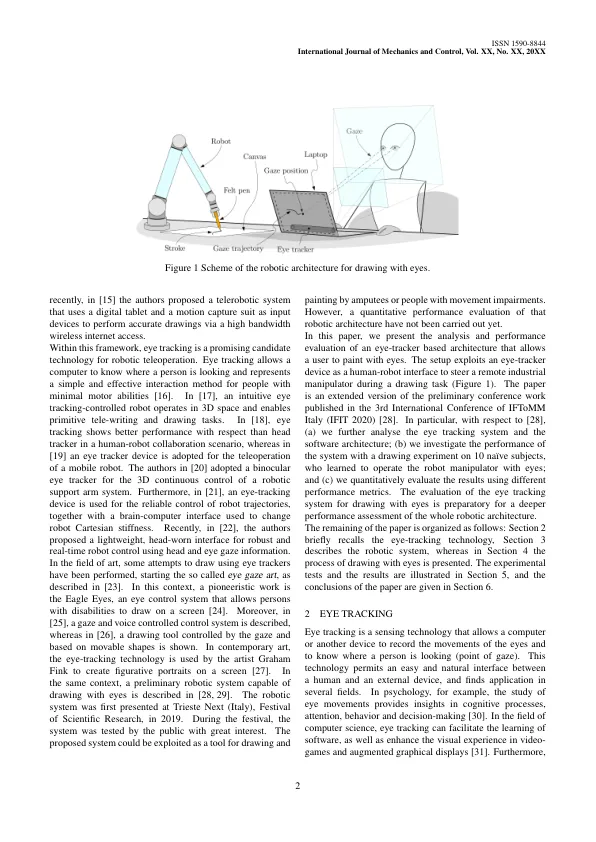
基于非遗迹技术和视觉反馈。Song等人给出了进一步的例子。[6],他为任意表面设计了一种艺术笔绘图系统,并由Karimov等人设计。[7],他实施了一个笛卡尔机器人,能够用类似人类的运动学创建全彩色图像。最新的艺术机器人示例包括[8]中显示的交互式绘画系统,[9]中介绍的喷枪机器人建筑,采用移动机器人作为艺术绘画的采用,如[10,11]中,以及[12]中描述的调色刀绘画技术的自动化。在大多数情况下,机器人系统与人类艺术家之间的相互作用仅限于软件和硬件参数的选择,并且绘画过程主要由算法和基于启动输入图像处理。在文献中只能找到由人类遥控控制的机器人绘画系统的示例。这些主要与机器人远程注射有关,例如在[13]中,基于功能 - 基于力的vision界面允许操作员制作远程机器人绘制。此外,在[14]中,基于脑部计算机界面和用于神经机构绘画的机器人结构开发了人机界面。系统测量用户的大脑活动,并将记录的大脑信号关联到操纵器的简化运动中。更多
用眼睛绘画的机器人体系结构的性能评估
主要关键词




相关文件推荐