机构名称:
¥ 1.0
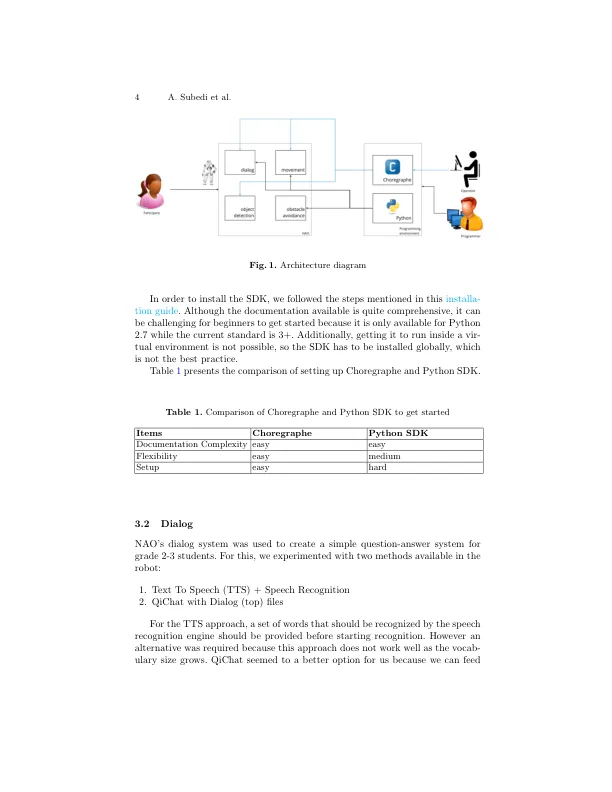
摘要。为教育目的编程人类机器人是一项艰巨的任务,对于初学者来说,经验很少。有几项研究可用,其中人类机器人(如NAO)被用于教育环境中,以移动,识别对象并进行类似人类的对话。这些研究通常包含第三方图书馆和先进的深度学习方法,因此很难遵循初学者。本文旨在作为使用ChoreGraphe和Python SDK对NAO机器人进行编程的人的启动指南。在这项研究中,NAO机器人使用机器人随附的可用组件来基于对话,运动,对象识别和避免障碍物的四个方案。本文着重于在此过程中通过考虑两种方法的优点和局限性在此过程中比较浮雕和Nao Python SDK。结果表明,曲线和python SDK都具有细微差别,其用法取决于用例。但是,对于刚起步的初学者来说,在不编写单行代码的情况下完成工作更容易完成。python,另一方面,对于低级功能很有用,并提供了更具灵活性。
曲线和python SDK
主要关键词




相关文件推荐