机构名称:
¥ 3.0
∗作者在法国图卢兹Laas CNRS获得了机器人和人工智能的博士学位。他是一名研究人员的研究人员,对车轮探索机器人进行了任务计划和执行,并领导了R&D团队的资源优化,以优化卫星的狮子座星座,小型类人机器人的角色动画,室内式无人机的自主导航以及在物流环境中AMR的企业范围内的任务计划以及AMR的导航。他曾担任过运营角色,例如创建和管理领域的工程师,以部署AMRS和一组运营商来远程监督它们。作者现在是L3/L4高速公路自动化车辆的技术领导者。本出版物中表达的意见是作者的意见。他们不愿意反映其现任/前任雇主的观点或观点。
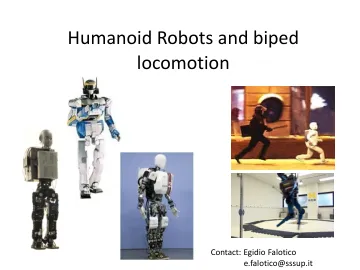
工作中的人形机器人:我们在哪里
主要关键词
相关文件推荐