机构名称:
¥ 2.0
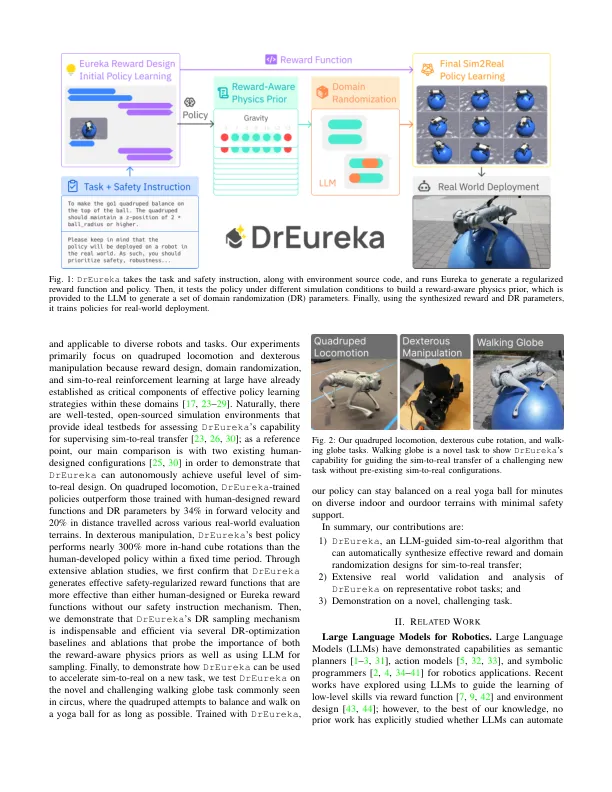
摘要 - 在模拟到现实世界中学到的传递政策是一种大规模获取机器人技能的有前途的策略。但是,SIM到实现的方法通常依赖于手动设计和任务奖励函数的调整以及模拟物理参数,从而使过程缓慢而人类限制。在本文中,我们使用大型语言模型(LLM)进行调查以自动化并加速模拟设计。我们的LLM引导的SIM到运行方法仅需要目标任务的物理模拟,并自动构建合适的奖励功能和域随机分布以支持现实世界传输。我们首先证明我们的方法可以发现SIM到真实的配置,这些配置与四倍的运动和灵巧的操纵任务上现有的人类设计的配置具有竞争力。然后,我们展示了我们的方法能够解决新颖的机器人任务,例如不迭代手动设计的瑜伽球上四倍的平衡和行走。
dreureka:语言模型指导SIM到现实传输
主要关键词




相关文件推荐