机构名称:
¥ 1.0
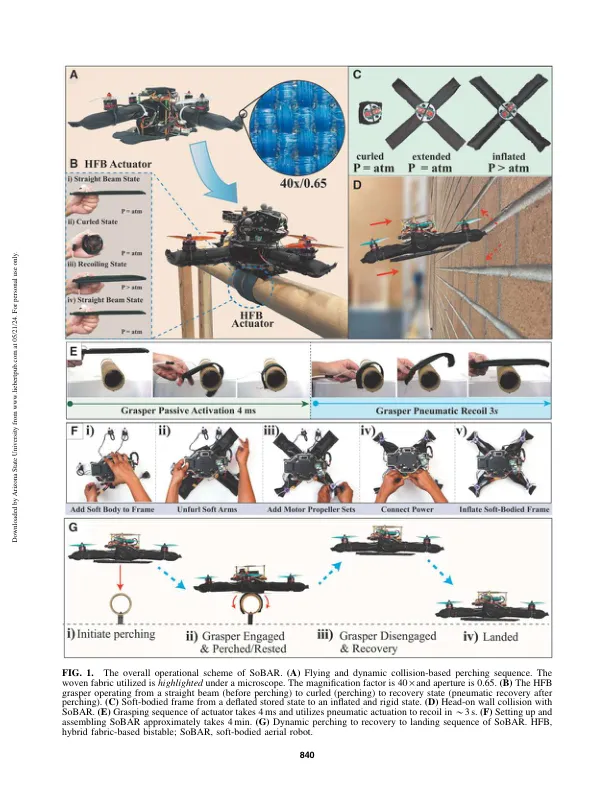
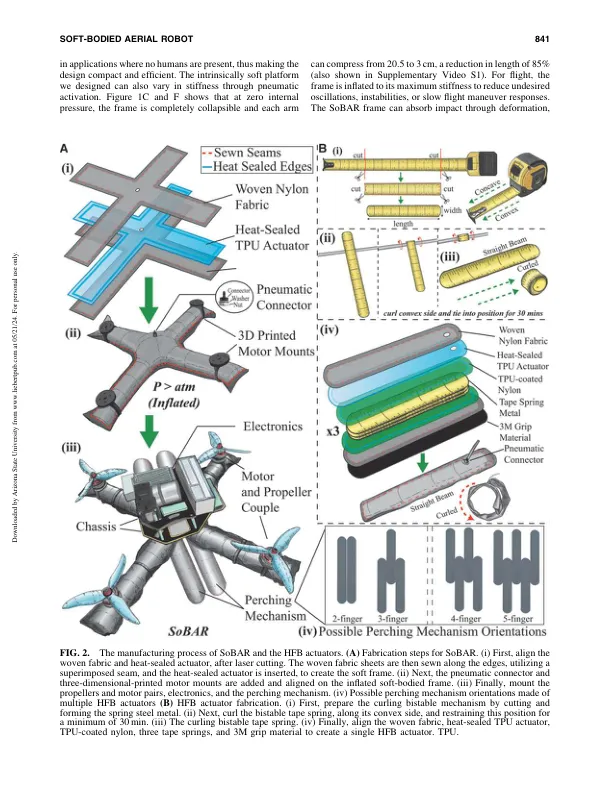
当前的空中机器人与生物学对应物相比,在非结构化环境中的相互作用能力有限。一些示例包括它们无法忍受碰撞并在未知形状,尺寸和纹理的物体上成功降落或栖息。纳入合规性的努力引入了设计,以减少敏捷性和由于增加的重量而以减小的敏捷性和旋转时间为代价。在这项工作中,我们提出并发展了一种轻巧,易感性,柔软的空中机器人(SOBAR),该机器人(SOBAR)可以随时改变其体内刚度以实现固有的碰撞弹性。与常规的刚性空中机器人不同,SOBAR成功地证明了其反复忍受和从各个方向上的碰撞中恢复的能力,不仅限于平面内部的碰撞。此外,我们利用其能力来证明三维碰撞弹性有助于提高栖息的成功率的栖息地。我们还使用一种新型混合织物的Bistable(HFB)Grasper增强SOBAR,该杂种可以利用冲击能量来通过快速形状构象的能力进行接触反应抓握。我们详尽地研究并提供了有关HFB Grasper的Sobar的碰撞弹性,影响吸收和操纵能力的见解。最后,我们通过碰撞表征,抓握识别以及在各种情况下以及不同形状的物体上对传统空中机器人与SOBAR的性能进行比较。
通过电解质选择作者揭示了分子量对糖化聚噻吩混合传导的影响:joshua tropp,A,†dila
主要关键词



相关文件推荐