机构名称:
¥ 2.0
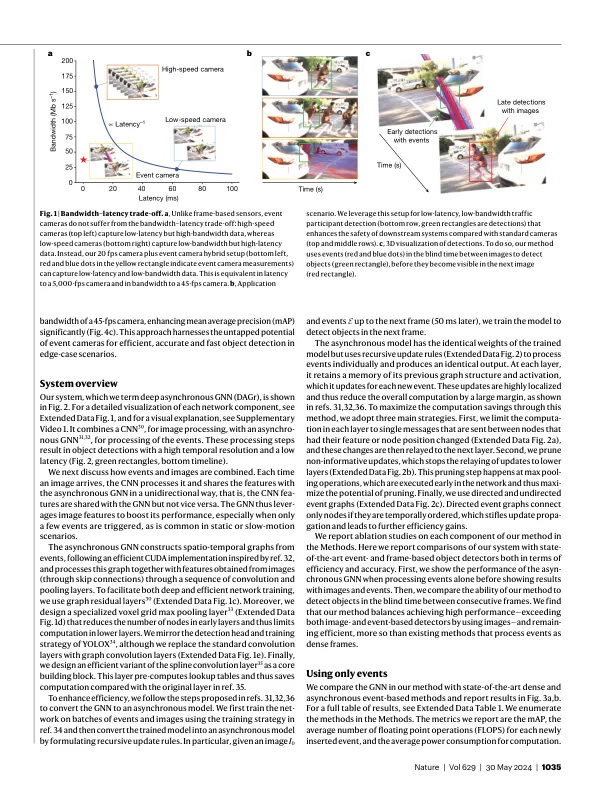
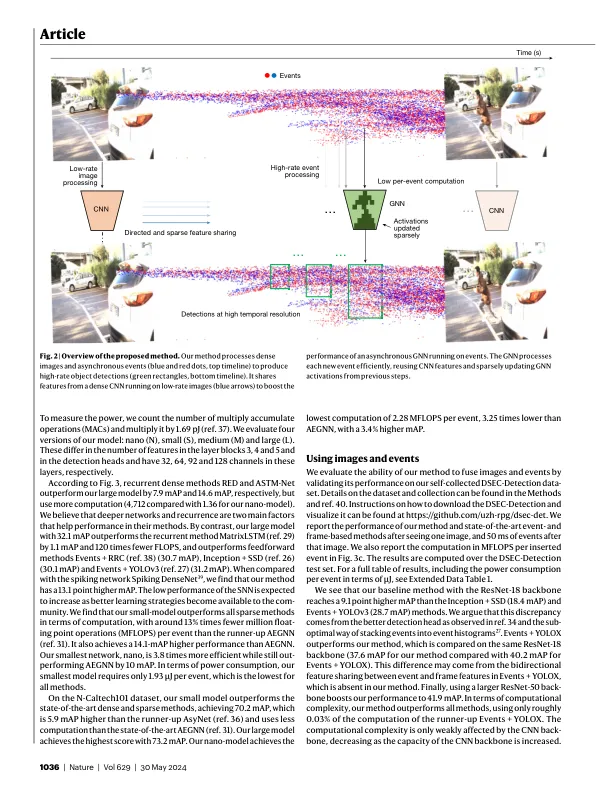
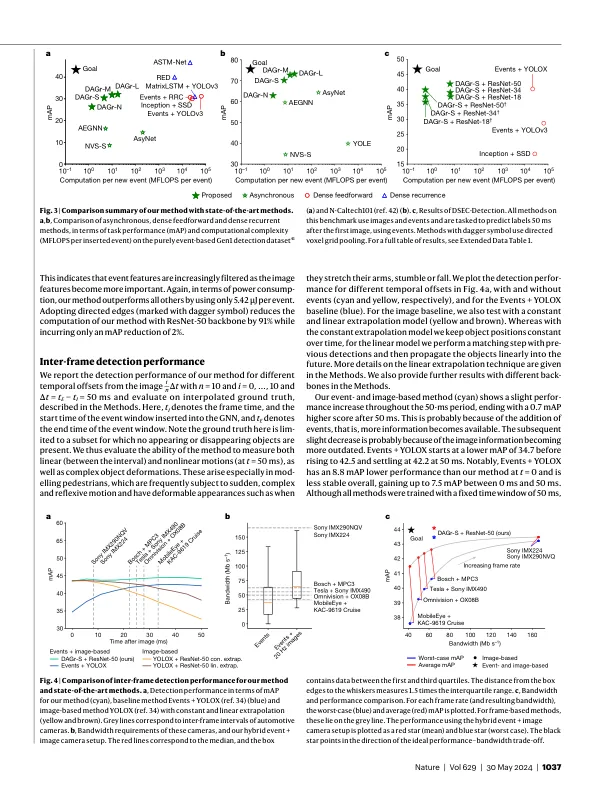
高级驱动程序辅助系统中当前使用的计算机视觉算法依赖于基于图像的RGB摄像机,从而实现了至关重要的带宽 - latatency折衷,以提供安全的驾驶体验。为了解决这个问题,事件摄像机已成为替代视觉传感器。事件摄像机测量强度不同步的变化,提供了高的时间分辨率和稀疏性,显着降低了带宽和潜伏要求1。尽管有这些优势,但基于事件相机的算法在准确性方面还是高效,但要么落后于基于图像的算法,要么牺牲事件的稀疏性和效率以获得可比的结果。为了克服这一点,我们在这里提出了一个基于混合事件和框架的对象检测器,该对象检测器保留了每种方式的优势,因此并不遭受这种权衡。我们的方法利用了事件的高时间分辨率和稀疏性以及标准图像中富裕但低的时间分辨率信息,以生成有效的高速对象检测,从而减少感知和计算潜伏期。我们表明,使用20帧每秒(FPS)RGB摄像头和事件摄像机的使用可以达到与5,000-FPS摄像机相同的延迟,而具有45-FPS摄像机的带宽而不会损害精度。我们的方法通过发现事件摄像机2的潜力,为在边缘场景中有效和强大的感知铺平了道路。
带有事件摄像机的低延迟汽车视觉
主要关键词


相关文件推荐