机构名称:
¥ 2.0
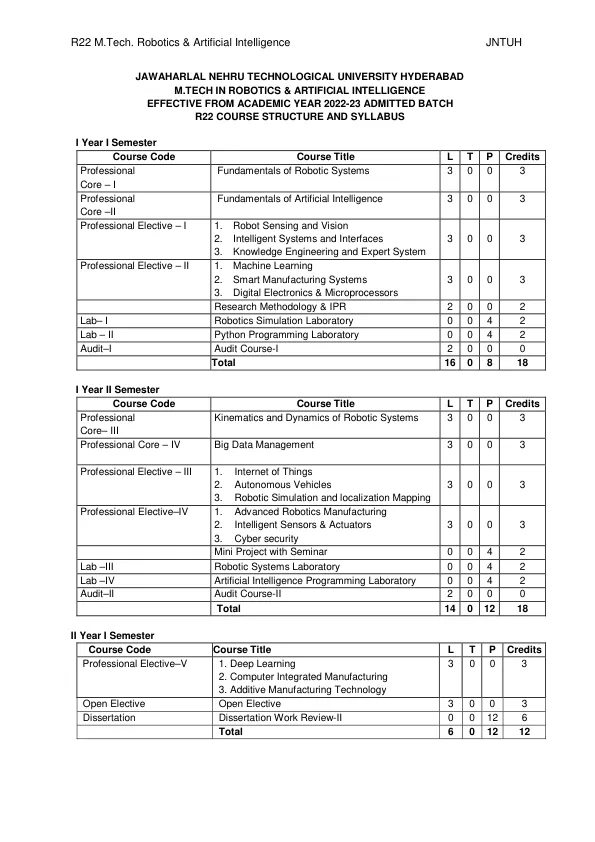
机器人系统基础单元 - I 简介:机器人解剖学 - 定义、机器人定律、机器人的历史和术语 - 机器人的准确性和重复性 - 简单问题 - 机器人的规格 - 机器人的速度 - 机器人关节和链接 - 机器人分类 - 机器人系统架构 - 机器人驱动系统 - 液压、气动和电气系统。单元 - II:末端执行器和机器人控制:机械夹持器 - 曲柄滑块机构、螺旋式、旋转执行器、凸轮式 - 磁性夹持器 - 真空夹持器 - 气动夹持器 - 夹持力分析 - 夹持器设计 - 简单问题 - 机器人控制 - 点对点控制、连续路径控制、智能机器人 - 机器人关节控制系统 - 控制动作 - 反馈装置 - 编码器、解析器、 LVDT - 运动插值 - 自适应控制。第三单元:机器人变换和传感器:机器人运动学 - 类型 - 2D 和 3D 变换 - 缩放、旋转、平移 - 齐次坐标、多个变换 - 简单问题。机器人中的传感器 - 触摸传感器 - 触觉传感器 - 近距离和范围传感器 - 机器人视觉传感器 - 力传感器 - 光传感器、压力传感器。第四单元:机器人单元设计和微/纳米机器人系统:机器人工作单元设计和控制 - 序列控制、操作员界面、机器人中的安全监控设备 - 移动机器人工作原理、使用 MATLAB 进行驱动、NXT 软件介绍 - 机器人应用 - 材料处理、机器装卸、装配、检查、焊接、喷漆和海底机器人。微/纳米机器人系统概述-缩放效应-自上而下和自下而上的方法-微/纳米机器人系统的执行器-纳米机器人通信技术-微/纳米夹持器的制造-爬壁微型机器人的工作原理-仿生机器人-群体机器人-纳米机器人在靶向药物输送系统中的应用。单元 - V:机器人编程-介绍-类型-柔性吊坠-引导编程,机器人坐标系统,机器人控制器-主要组件,功能-腕部机构-插值-联锁命令-机器人的操作模式,慢跑类型,机器人规格-运动命令,末端执行器和传感器命令。机器人语言-分类,结构-VAL-语言命令运动控制,手动控制,程序控制,拾取和放置应用,使用 VAL 的码垛应用,使用 VAL 程序的机器人焊接应用-WAIT、SIGNAL 和 DELAY 命令使用简单应用程序进行通信。 RAPID-语言基本命令-运动指令-使用工业机器人进行拾取和放置操作-手动模式、自动模式、基于子程序命令的编程。移动-主命令语言-介绍、语法、简单问题。VAL-II 编程-基本命令、应用程序-使用条件语句的简单问题-简单的拾取和放置应用程序。
R22 M.Tech. 机器人与人工智能 JNTUH
主要关键词


相关文件推荐