机构名称:
¥ 1.0
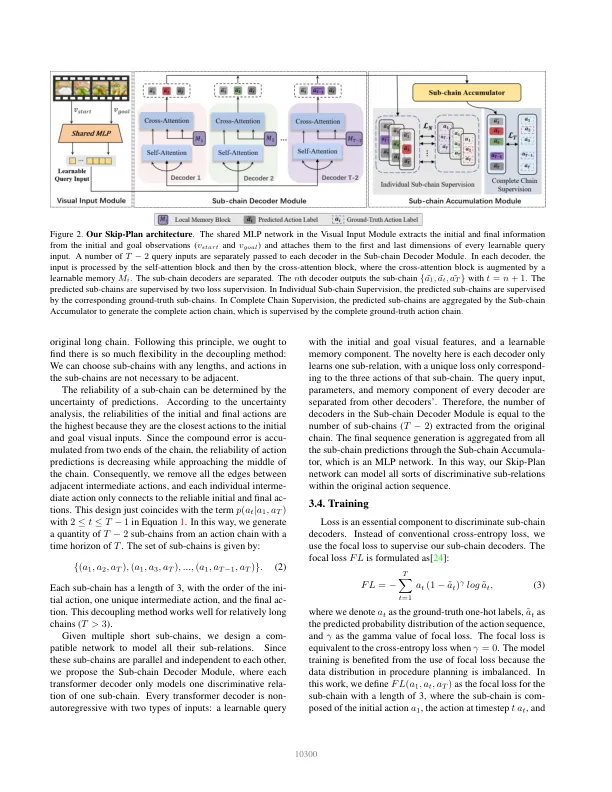
在本文中,我们提出了 Skip-Plan,一种用于教学视频中程序规划的压缩动作空间学习方法。当前的程序规划方法都遵循每个时间步的状态-动作对预测并相邻地生成动作。虽然它符合人类的直觉,但这种方法始终难以应对高维状态监督和动作序列的错误积累。在这项工作中,我们将程序规划问题抽象为数学链模型。通过跳过动作链中不确定的节点和边,我们以两种方式将长而复杂的序列函数转换为短而可靠的序列函数。首先,我们跳过所有中间状态监督,只关注动作预测。其次,我们通过跳过不可靠的中间动作将相对较长的链分解为多个短的子链。通过这种方式,我们的模型在压缩动作空间中探索动作序列内各种可靠的子关系。大量实验表明,Skip-Plan 在程序规划的 CrossTask 和 COIN 基准测试中实现了最先进的性能。
Skip-Plan:通过精简动作空间学习在教学视频中进行程序规划
主要关键词




相关文件推荐