机构名称:
¥ 1.0
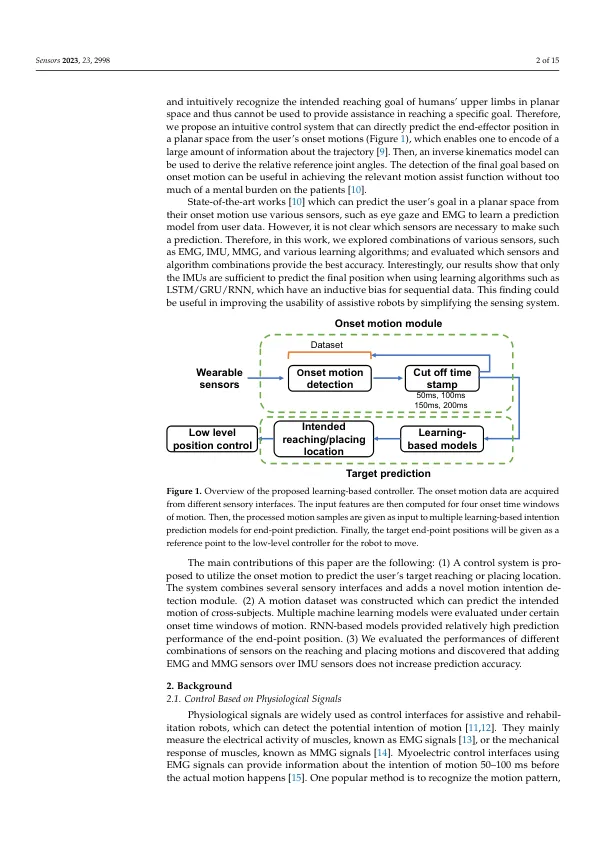
摘要:缺乏直观和活跃的人类 - 动物相互作用使使用上肢辅助设备很难。在本文中,我们提出了一个基于学习的新型控制器,该控制器直觉地使用发作运动来预测辅助机器人所需的终点位置。实施了一个由惯性测量单元(IMU),肌电图(EMG)传感器和机械学(MMG)传感器组成的多模式传感系统。该系统用于在达到五个健康受试者执行的任务期间获取运动学和生理信号。提取了每个运动试验的开始运动数据,以输入传统的回归模型和训练和测试的深度学习模型。模型可以预测手在平面空间中的位置,这是低级位置控制器的参考位置。结果表明,使用IMU传感器与提出的预测模型具有足够的运动意图检测,与添加EMG或MMG相比,该模型可以提供几乎相同的预测性能。此外,基于复发的神经网络(RNN)模型可以在短发时间窗口中预测目标位置以进行动作,并且适合在更长的视野上预测目标的目标。这项研究的详细分析可以提高辅助/康复机器人的可用性。
基于学习的运动观点预测上限辅助机器人的终点控制
主要关键词


相关文件推荐