机构名称:
¥ 1.0
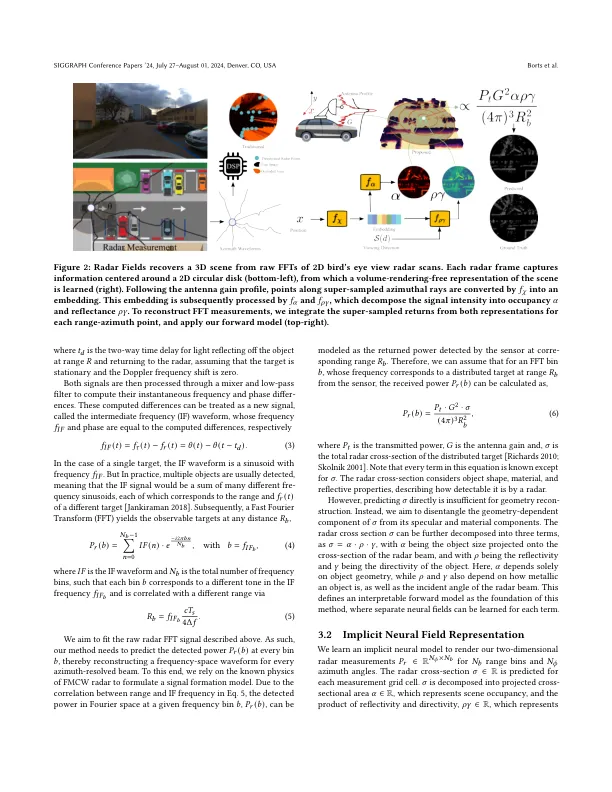
为主动和被动的光学感官技术提供了互补的方式。此外,现有的雷达传感器具有很高的成本效益,并且在运行在户外操作的机器人和车辆中。我们介绍了雷达场 - 一种为活动雷达成像器设计的神经场景重建方法。我们的方法将具有隐式神经几何形状和反射模型的显式,物理知识的传感器模型团结起来,以直接合成原始雷达测量并提取场景占用率。所提出的方法不依赖卷渲染。相反,我们在傅立叶频率空间中学习字段,并通过原始雷达数据监督。我们验证了我们在各种室外场景中的有效性,包括带有密集车辆和基础设施的城市场景以及MM波长感应的恶劣天气情况。
雷达场:FMCW雷达的频率空间神经场景表示
主要关键词




相关文件推荐