机构名称:
¥ 1.0
[1]本·艾斯纳(Ben Eisner),哈里·张(Harry Zhang)和大卫(David Hold)。flowbot3d:学习3D表达流动以操纵表达的观察。arxiv预印arxiv:2205.04382,2022。1 [2] Haoran Geng,Ziming Li,Yiran Geng,Jiayi Chen,Hao Dong和He Wang。partManip:从点云观察到学习跨类别的可推广零件操纵策略。在IEEE/CVF计算机视觉和模式识别会议论文集,第2978-2988、2023页。2 [3] Haoran Geng,Helin Xu,Chengyang Zhao,Chao Xu,Li Yi,Siyuan Huang和Wang。gapartnet:跨类别域,可通过可概括和可行的部分操纵对象感知和操纵。在IEEE/CVF计算机视觉和模式识别会议论文集,第7081–7091页,2023年。1,2 [4] Yiran Geng,Boshi AN,Haoran Geng,Yuanpei Chen,Yaodong Yang和Hao Dong。机器人操纵的端到端舞蹈学习。arxiv预印arxiv:2209.12941,2022。2 [5] James J Gibson。 提供的理论。 Hilldale,美国,1(2):67–82,1977。 2 [6] Suhan Ling,Yian Wang,Shiguang Wu,Yuzheng Zhuang,Tianyi Xu,Yu Li,Chang Liu和Hao Dong。 铰接的物体操纵,用粗到精细的负担能力来降低点云噪声的效果。 ICRA,2024。 2 [7]刘刘,韦奇安格Xu,haoyuan fu,sufe Qian,Qiao-jun yu,Yang Han和Cewu lu。 AKB-48:一个现实世界中阐明的对象知识库。 在IEEE/CVF计算机视觉和模式识别会议论文集,第14809–14818页,2022年。2 [5] James J Gibson。提供的理论。Hilldale,美国,1(2):67–82,1977。 2 [6] Suhan Ling,Yian Wang,Shiguang Wu,Yuzheng Zhuang,Tianyi Xu,Yu Li,Chang Liu和Hao Dong。 铰接的物体操纵,用粗到精细的负担能力来降低点云噪声的效果。 ICRA,2024。 2 [7]刘刘,韦奇安格Xu,haoyuan fu,sufe Qian,Qiao-jun yu,Yang Han和Cewu lu。 AKB-48:一个现实世界中阐明的对象知识库。 在IEEE/CVF计算机视觉和模式识别会议论文集,第14809–14818页,2022年。Hilldale,美国,1(2):67–82,1977。2 [6] Suhan Ling,Yian Wang,Shiguang Wu,Yuzheng Zhuang,Tianyi Xu,Yu Li,Chang Liu和Hao Dong。铰接的物体操纵,用粗到精细的负担能力来降低点云噪声的效果。ICRA,2024。2 [7]刘刘,韦奇安格Xu,haoyuan fu,sufe Qian,Qiao-jun yu,Yang Han和Cewu lu。AKB-48:一个现实世界中阐明的对象知识库。在IEEE/CVF计算机视觉和模式识别会议论文集,第14809–14818页,2022年。2 [8] Kaichun MO,Leonidas J. Guibas,Mustafa Mukadam,Abhi-Nav Gupta和Shubham Tulsiani。其中2act:从pix-els到铰接3D对象的动作。在IEEE/CVF国际计算机愿景会议论文集(ICCV),第6813-6823页,2021年。1,2 [9] Chuanrou Ning,Ruihai Wu,Haoran Lu,Kaichun Mo和Hao Dong。其中2个口气:对于看不见的新型铰接对象类别的负担能力学习。在神经信息处理系统(神经)中的广告中,2023年。2 [10] Yusuke Urakami,Alec Hodgkinson,Casey Carlin,Randall Leu,Luca Rigazio和Pieter Abbeel。门口:可扩展的门打开环境和基线代理。ARXIV预印arxiv:1908.01887,2019。1,2 [11]学习开门操作的语义关键点表示。IEEE机器人技术和自动化Letters,5(4):6980–6987,2020。1 [12] Yian Wang,Ruihai Wu,Kaichun MO,Jiaqi KE,Qingnan Fan,Leonidas Guibas和Hao Dong。adaafford:通过几乎没有相互作用,学习适应3D铰接式物体的操纵负担。欧洲计算机录像会议(ECCV 2022),2022。2 [13] Ruihai Wu,Yan Zhao,Kaichun MO,Zizheng Guo,Yian Wang,Tianhao Wu,Qingnan Fan,Xuelin Chen,Leonidas Guibas和Hao Dong。增值税:学习视觉动作
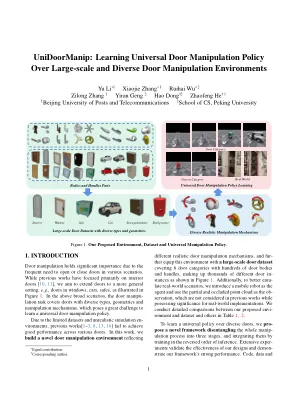
学习通用门操作政策,大多数...
主要关键词


相关文件推荐