
机构名称:
¥ 1.0
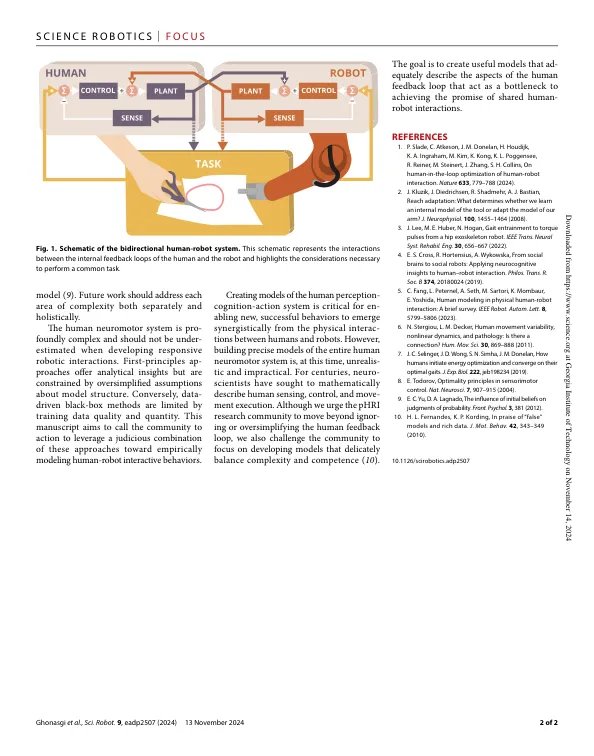
人类的标志是我们创建增强我们功能的工具的能力,而内在的机器人是迄今为止此类工具中最复杂,最强大的机器人。机器人可以增强人类运动功能,学会提高和提高自己的自主技能,并提供通过协作来实现固有的人类和机器人能力的潜力。并不能保证实现这种共同自主权的态度。自然的人类适应和编程的机器人适应可能不会有效地协同作用,从而导致合作任务绩效并没有比单独完成任务的任何代理人更好,甚至更糟。此外,物理世界中的人类机器人相互作用可能会带来严重的后果,例如人身伤害和设备损害。因此,协作机器人算法的谨慎设计对于防止因与人类的无效和不安全相互作用而导致的负面序列至关重要。人类与机器人之间的合作受到了两种(或可能更多)代理之间相互作用的双向性质的严重影响1。人类和机器人的反馈回路显示了每个代理的控制(决策),植物(物理实施例)和感应(受到启示)块。互动箭头将机器人,人类和任务障碍物连接起来,象征着人类和机器人之间的动作和实时响应的同时和双向改变,以实现综合任务目标。在这里,我们认为将发生身体人类机器人互动(PHRI)的下一个重大突破尽管实现最佳共享性能需要考虑这两个反馈循环,但机器人循环比文献中的人类循环更加关注。
审阅者清单名称:R2实现人类机器人和谐的关键障碍
主要关键词

相关文件推荐























