机构名称:
¥ 1.0
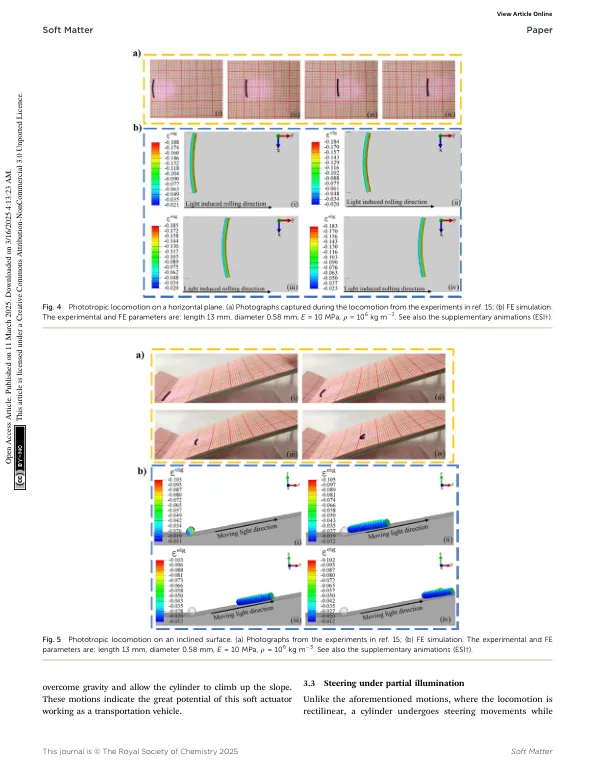
轻,热或湿度。15,47–49,例如,先前的研究表明,在均匀的光照射或升高温度下,圆柱形单域LCE杆可以连续滚动在平坦的表面(最高6 mm S 1)上。 47可以通过结合热刺激和光刺激来进一步控制滚动运动。 同样,通过基于纤维的执行器证明了受控运动,例如平坦和倾斜表面上的光启动(在速度上达到1.7 mm S 1的速度,最大的工作密度为0.179 kj kg 1,功率密度为24.28 w kg 1),以提高其额外的稳定性capabil-Ities iesies iesies shoundlyplys themplys themply。 当尼龙和聚二甲基硅氧烷(PDMS)纤维(4 mM S 1)放置在加热板上时,也观察到了15个不同的滚动行为(同时将弹性能量密度存储为300 kJ m 3)。 48,49 Other works on soft actuators investigate rectilinear motion, such as the curling of polyurethane (PU) hydrogel strips, 50 the crawling of LC network films 51 and the squeezing of arc-shaped robots made from LCE–carbon nanotubes 52 using ‘‘bow-shaped'' bimorph actuators that bend or ‘‘ring-shaped'' actuators that roll. 这些实验为设计和制造多功能软机器人车奠定了坚实的基础。 在轻度,热或湿度驱动的软机器人中自动滚动的实验生动地证明了各种运动机制,吸引了分析或数值分析这些行为的理论家的注意。15,47–49,例如,先前的研究表明,在均匀的光照射或升高温度下,圆柱形单域LCE杆可以连续滚动在平坦的表面(最高6 mm S 1)上。47可以通过结合热刺激和光刺激来进一步控制滚动运动。同样,通过基于纤维的执行器证明了受控运动,例如平坦和倾斜表面上的光启动(在速度上达到1.7 mm S 1的速度,最大的工作密度为0.179 kj kg 1,功率密度为24.28 w kg 1),以提高其额外的稳定性capabil-Ities iesies iesies shoundlyplys themplys themply。当尼龙和聚二甲基硅氧烷(PDMS)纤维(4 mM S 1)放置在加热板上时,也观察到了15个不同的滚动行为(同时将弹性能量密度存储为300 kJ m 3)。48,49 Other works on soft actuators investigate rectilinear motion, such as the curling of polyurethane (PU) hydrogel strips, 50 the crawling of LC network films 51 and the squeezing of arc-shaped robots made from LCE–carbon nanotubes 52 using ‘‘bow-shaped'' bimorph actuators that bend or ‘‘ring-shaped'' actuators that roll.这些实验为设计和制造多功能软机器人车奠定了坚实的基础。在轻度,热或湿度驱动的软机器人中自动滚动的实验生动地证明了各种运动机制,吸引了分析或数值分析这些行为的理论家的注意。已经开发了一种耦合的照片化学或热机械模型,以说明通过
使用触点有限元仿真滚动刺激圆柱机器人
主要关键词




相关文件推荐