机构名称:
¥ 1.0
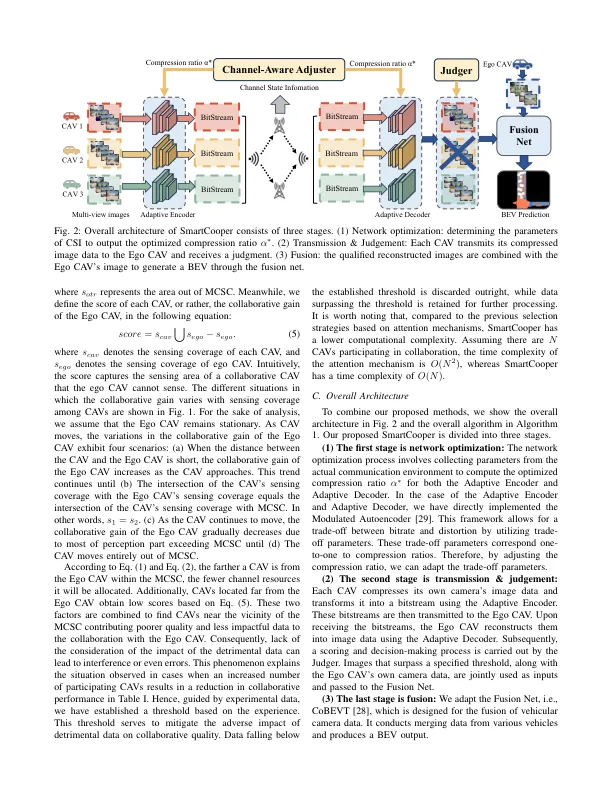
摘要 - 近年来,自动驾驶通过连接和自动驾驶汽车(CAVS)的协作感知来提高道路安全性的潜力,引起了人们的关注。然而,车辆传输环境中的时变频道变化需要传播资源分配。此外,在协作感知的背景下,重要的是要认识到并非所有骑士都贡献有价值的数据,而某些CAV数据甚至对协作感也有害影响。在本文中,我们介绍了SmartCooper,这是一个自适应的合作感知框架,该框架结合了通信优化和判断机制,以促进CAV数据融合。我们的方法始于在考虑通信限制的同时优化车辆的连通性。然后,我们训练一个可学习的编码器,以基于通道状态信息(CSI)动态调整压缩比。子分子,我们设计了一种判断机制来过滤由自适应解码器重建的有害图像数据。我们评估了我们在OpenCood平台上提出的算法的有效性。我们的结果表明,与非判断力计划相比,通信成本大幅降低了23.10%。与最先进的方案相比,我们对联合(AP@iou)的平均交叉点(AP@iou)的平均精度有了显着提高。
SmartCooper:自适应融合和判断机制的车辆协作感知
主要关键词



相关文件推荐