机构名称:
¥ 1.0
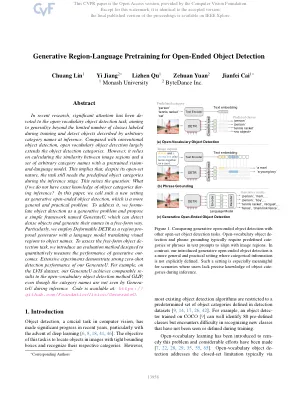
实现统一的单眼3D对象检测,包括室内和室外场景,在机器人导航等应用中非常重要。然而,涉及各种数据方案来训练模型引起了挑战,因为它们的特性显着不同,例如,二 - 几何特性和异质域分离。为了应对这些挑战,我们根据鸟类的视图(BEV)检测范式建立了一个检测器,在该检测范式中,当采用多个数据方案以训练检测器时,明确的特征投影有利于对几何学学习模棱两可。然后,我们将经典的BEV检测体系结构分为两个阶段,并提出了不均匀的BEV网格设计,以处理由上述Challenges引起的收敛不稳定。此外,我们开发了稀疏的BEV功能策略,以降低计算成本和处理异质域的统一操作方法。将这些技术结合起来,得出了一个统一的检测器Unimode,它超过了富有挑战性的Omni3D数据集(一个大规模的数据集(一个室内和室外场景))的先前最先进的AP 3D,揭示了Bev bev tor tor tor tor tor tor tor unified 3D对象的第一个成功概括。
Unimode:统一的单眼3D对象检测
主要关键词





相关文件推荐