机构名称:
¥ 1.0
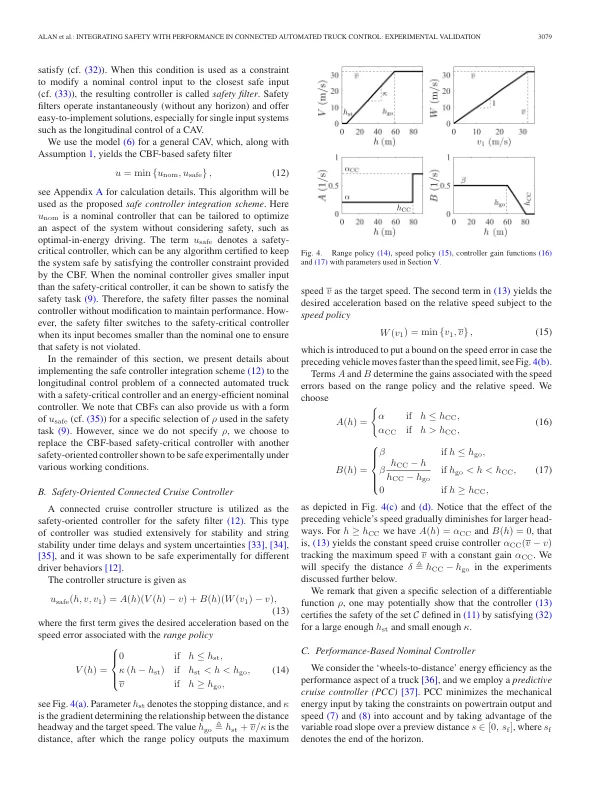
摘要 - 将效率与安全性结合起来是连接自动卡车的最重要设计挑战之一。在应对纵向控制问题的这一挑战中,我们提出了一种计划,该方案以无缝的方式将基于性能的控制器与面向安全的控制器集成在一起。此安全集成方案即时运行,并且与大型控制器兼容。我们首先将这种实用的整合方法链接到控制屏障功能的理论框架,该框架旨在赋予控制器具有正式安全保证。然后,通过此方案,我们安全地整合了一个预测型控制器,最大程度地限制了依靠连接性(连接的巡航控制-CCC)的面向安全的巡航控制器结构的能耗(预测巡航控制 - PCC)。重要的是,使用具有全面连接的自动化卡车的公路实验证明了PCC和CCC之间安全和无缝集成的效率。最初的实验活动是在封闭的测试轨道上举行的,并且由于CCC而实现了安全驾驶,而得益于PCC,可获得高达18%的能源。最后,实验扩展到公共高速公路,并以高达4.3%的节能获得了类似的结果。
实时地形自适应局部轨迹计划者,用于可变形地形上的高速自动越野导航将安全性与连接的自动卡车控制中的性能整合在一起:实验验证
主要关键词




相关文件推荐