机构名称:
¥ 2.0
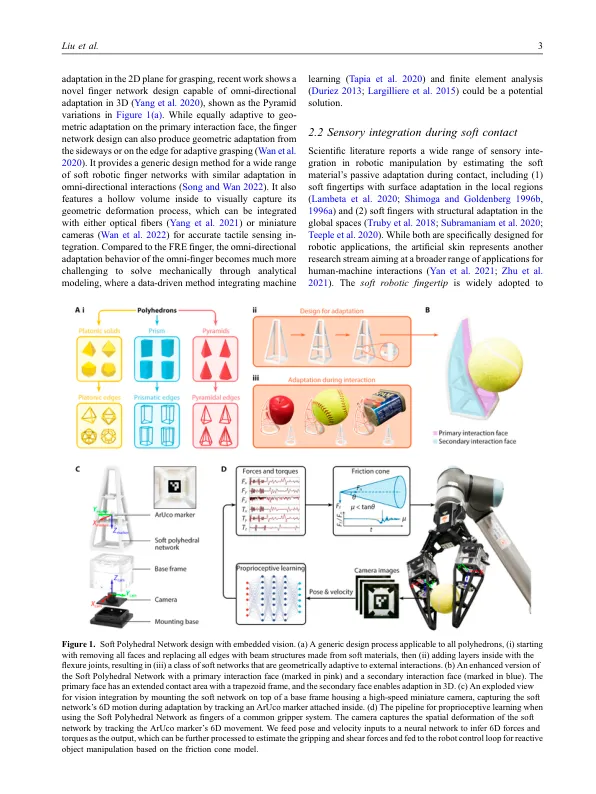
抽象的本体感受是检测运动神经元的肢体姿势的“第六含义”。它需要在肌肉骨骼系统和感觉受体之间进行自然整合,这在现代机器人中具有挑战性,旨在以低成本的机械设计和算法计算,以轻巧,适应性和敏感设计。在这里,我们介绍了软性多面体网络,具有对物理相互作用的嵌入式视觉,能够通过学习动力学特征来适应性动力学和粘弹性本体感受。此设计使被动适应全态相互作用,这是通过嵌入内部的微型高速运动跟踪系统在视觉上捕获的。结果表明,软网络可以在动态相互作用中推断出具有0.25/0.24/0.35 N和0.025/0.025/0.025/0.025/0.025/0.034/0.006 nm的实时6D力和扭矩。我们还通过添加蠕变和放松修饰者来鉴定预测结果,在静态适应过程中将粘弹性纳入静态适应性。提出的软网络结合了设计,全型适应性和本体感受的简单性,具有高精度,使其成为机器人技术的多功能解决方案,以低材料成本,超过一百万个用于敏感和竞争性的和触摸基于触摸的几何形状重构等任务的循环超过一百万个。这项研究为自适应抓握,软操纵和人类机器人相互作用的软机器人提供了新的见解。
Proprioceptive learning with soft polyhedral networks
主要关键词



相关文件推荐


















![arXiv:2201.02807v1 [cond-mat.soft] 2022 年 1 月 8 日](/simg/1/170eecb5adfeea1b8eb88dcbc322bebe65346a56.webp)