机构名称:
¥ 1.0
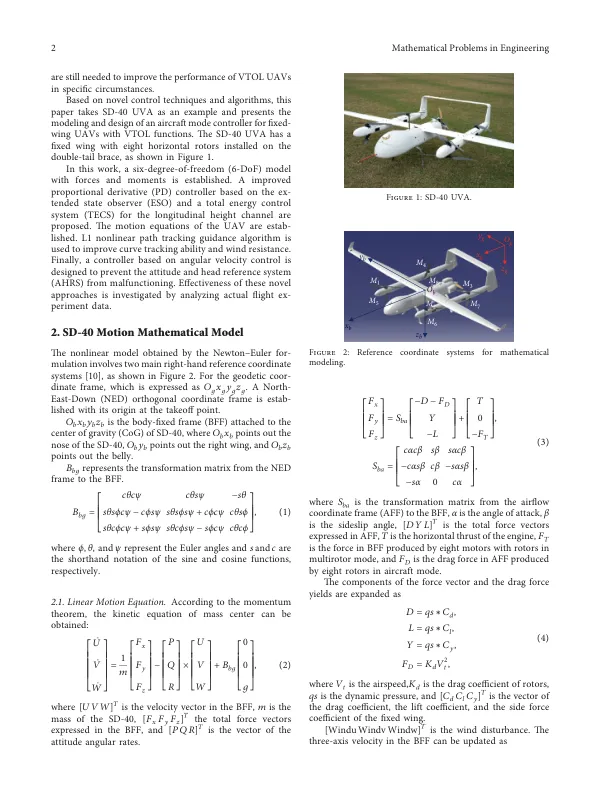
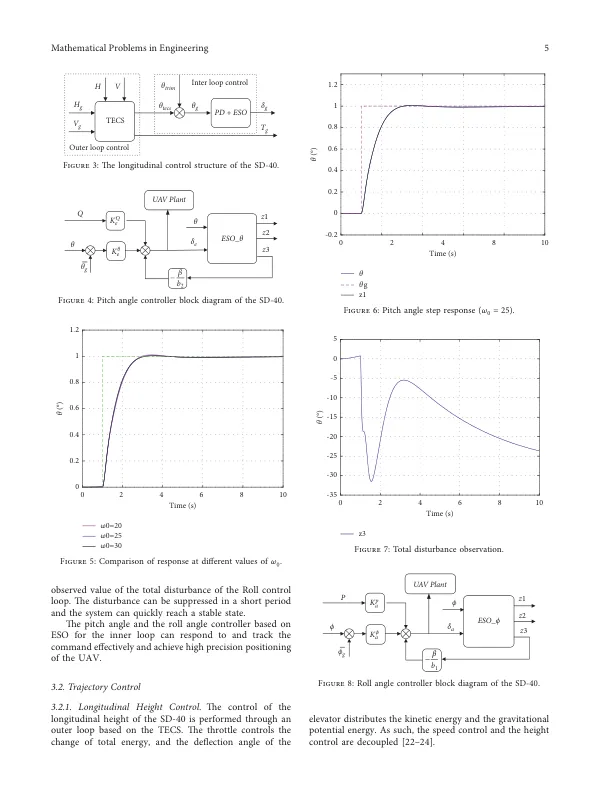
垂直起降(VTOL)是无人机(UAV)的基本功能。VTOL一方面可以拓展和增强无人机的应用领域,但另一方面也使得无人机控制系统的设计更加复杂。控制系统设计中最具挑战性的需求是实现固定翼无人机对控制指令满意的响应敏锐度以及确保飞机模态通道有效解耦。本文在气动分析的基础上,建立了含有力和力矩的六自由度(6-DoF)模型,并通过计算流体力学(CFD)数值模拟进行气动分析。提出一种基于扩张状态观测器(ESO)的改进比例微分(PD)控制器来设计内环姿态控制,增强了无人机系统对内外部不确定性的抗干扰能力。建立无人机运动方程,将运动方程分解为纵向和横侧两个独立运动分量,设计小扰动条件下的外环控制律;提出一种纵向高度通道总能量控制系统(TECS),将速度控制与航迹控制分离;横侧轨迹跟踪采用L1非线性路径跟踪制导算法,提高曲线跟踪能力和抗风能力。实飞实验数据证明了该方法的有效性。最后,设计了一种控制律。
飞机模式控制器的建模与设计...
主要关键词


相关文件推荐