机构名称:
¥ 1.0
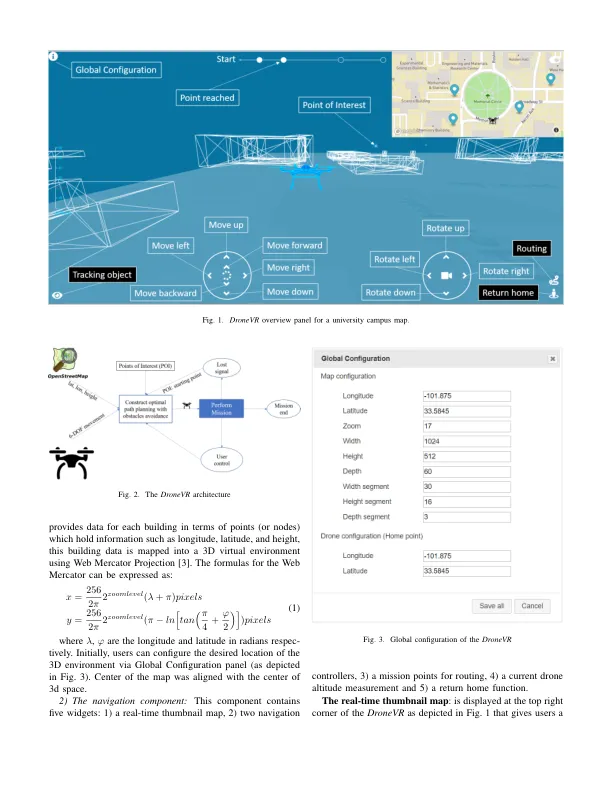
摘要 — 近年来,无人驾驶飞行器 (UAV) 已广泛应用于娱乐、虚拟旅游、建筑、采矿、农业等各种领域。导航、路径规划和图像采集是管理这些飞行设备的主要任务,同时还要对价格实惠的飞行器进行实时物体跟踪。飞机坠毁是最关键的问题之一,因为不受控制的环境和信号丢失会导致飞行器在返回过程中撞到建筑物。此外,实时图像处理(例如物体跟踪)尚未用于低成本飞行器。本文提出了一种嵌入在基于 Web 的应用程序中(称为 DroneVR)的原型,以缓解上述问题。虚拟现实环境是根据现实世界的飞行数据(OpenStreetMap)重建的,并在其中进行路径规划和导航。高斯混合模型用于提取前景并检测移动物体,然后应用卡尔曼滤波方法来预测和跟踪物体的运动。为了改进模拟器,我们通过小规模样本用户调查了感知到的易用性。索引术语 —UAV、虚拟现实、无人机坠毁、3D 模拟器、Openstreetmap、路径规划
DRONEVR:DroneOperator 的虚拟现实模拟器
主要关键词




相关文件推荐





![VR778 单页纸[1].pdf](/simg/f/fcbe69d454db14476cf139b161d4dd0a621aafd4.webp)