机构名称:
¥ 1.0
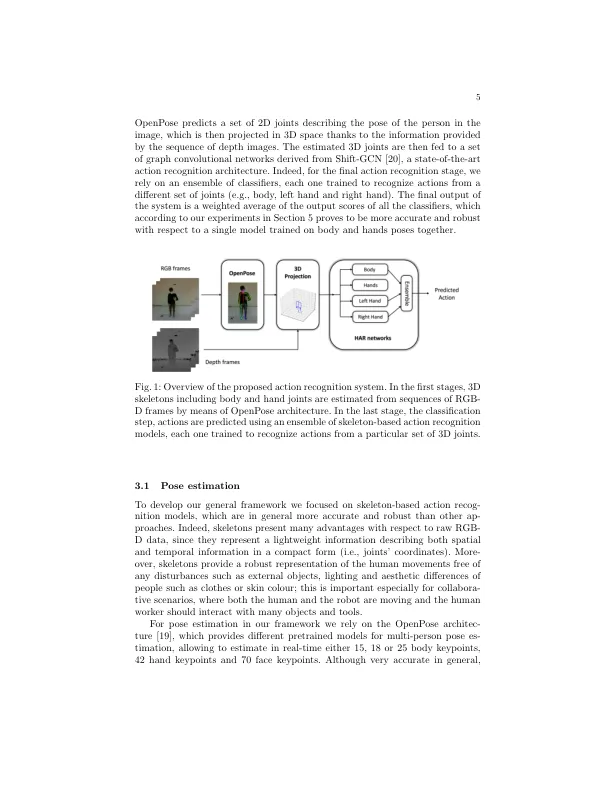
摘要。人类行动识别在实现人类与机器人之间的有效和安全的合作中起着重要作用。例如,考虑一项协作的组装任务,人工可以使用手势与机器人进行通信,而机器人可以利用公认的行动来预测组装过程中的下一步,从而提高安全性和整体生产率。在这项工作中,我们提出了一个基于3D姿势和合奏技术的人类行动识别的新框架。在这种框架中,我们首先通过敞开和RGB-D数据估算人体和身体关节的3D坐标。然后将估计的接头馈送到一组源自Shift-GCN的图形卷积网络,这是每个关节集(即车身,左手和右手)的一个网络。最后,使用集合方法,我们平均所有网络的输出得分来预测最终的人类行动。在一个名为IAS-LAB协作HAR DATASET的专用数据集上评估了所提出的框架,该数据集包括在人机协作任务中常用的操作和手势。实验结果证明了不同动作识别模型的界面如何有助于提高整体系统的准确性和鲁棒性。
基于骨架的动作和手势识别人类机器人协作
主要关键词




相关文件推荐