机构名称:
¥ 1.0
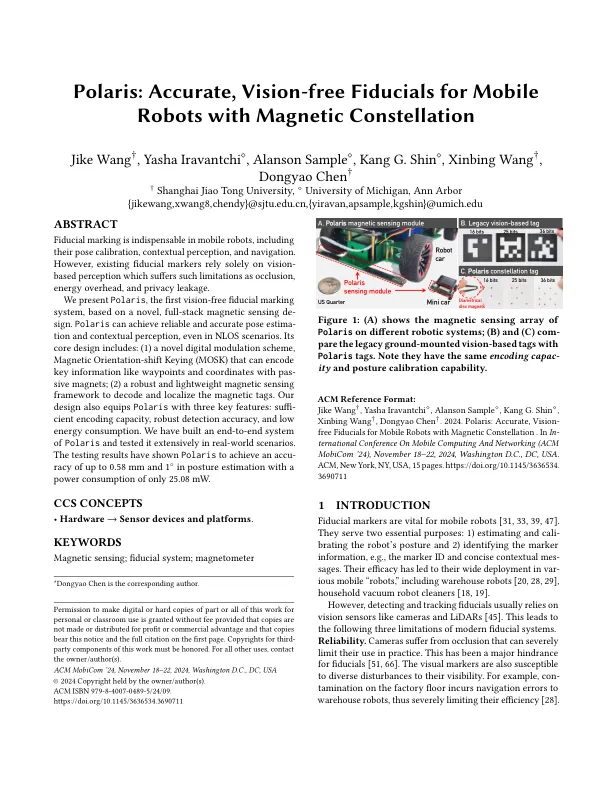
信托标记在移动机器人中是必不可少的,包括其姿势校准,上下文感知和导航。然而,现有的基准标记仅依赖于基于视觉的感知,而这种看法遭受了遮挡,能量开销和隐私泄漏等限制。我们提出了北极星,这是第一个基于新颖的,全堆栈的磁性传感的无视力标记系统。北极星即使在NLOS方案中也可以实现可靠,准确的姿势估计和上下文感知。其核心设计包括:(1)一种新型的数字调制方案,磁取向迁移键合(MOSK),可以编码关键信息,例如航路点和使用Passive Magnets的坐标; (2)一个强大而轻巧的磁传感框架,用于解码和定位磁性标签。我们的设计还为北极星提供了三个关键特征:足够的编码容量,可靠的检测准确性和低能消耗。我们已经建立了一个北极星的端到端系统,并在现实世界中进行了广泛的测试。测试结果表明北极星以达到高达0.58 mm和1°的姿势估计,功率消耗仅为25.08 mW。
Polaris:具有磁性星座的移动机器人的准确,无远见的信托
主要关键词




相关文件推荐