机构名称:
¥ 3.0
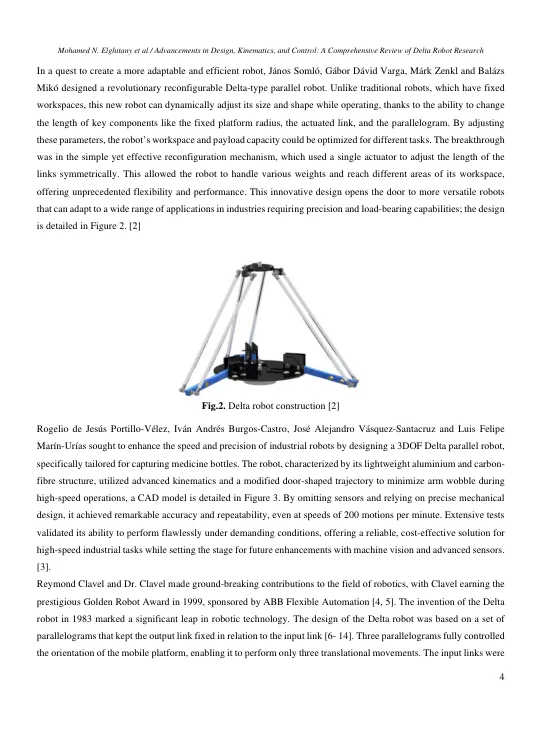
DILTA机器人是一种平行机器人,由三个臂组成,该机器人连接到底座上的通用关节。Delta机器人专为高速,精确任务而设计,通常用于诸如拾取操作,组装和包装等应用程序。本文进行了Delta机器人的进化,设计,运动学和控制系统,突出了其进步和工业应用。从1980年代的成立开始,该论文研究了雷蒙德·克拉维尔(Raymond Clavel)的开创性设计,该设计通过独特的并行机制彻底改变了高速,精确的拾取和位置操作。讨论了Delta机器人的后续迭代,包括诸如倒置配置,线性三角洲机器人,模块化设计和微观应用程序的小型化版本之类的创新。审查研究了各种控制策略,从传统的PID和滑动模式控制到基于高级神经网络的系统,这些系统应对奇异性,工作区优化和能源效率等挑战。在食品包装,药品和高精度组装等领域的应用强调了机器人的多功能性。该研究以对新兴趋势的见解,例如适应性重新配置的设计和增强的运动计划,为机器人自动化的未来创新铺平了道路。
Delta机器人研究的全面审查
主要关键词




相关文件推荐