机构名称:
¥ 1.0
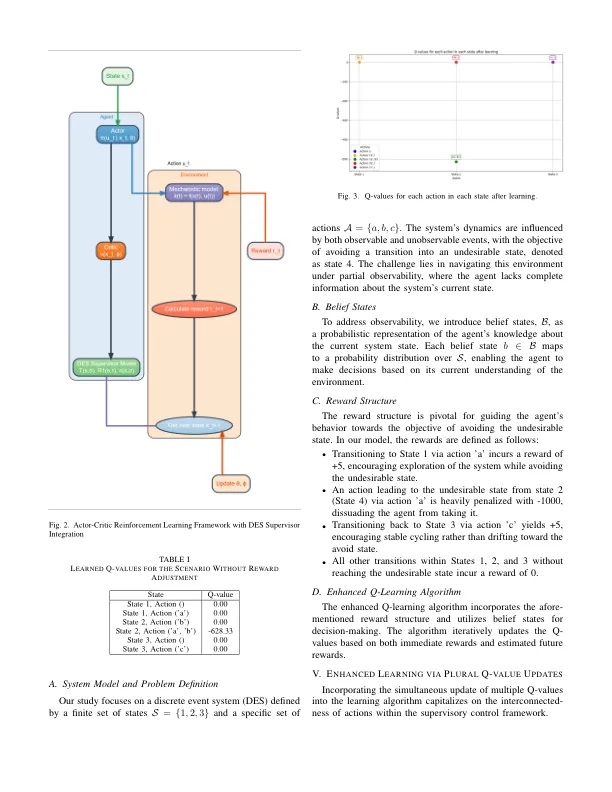
摘要 - 强化学习(RL)已成为复杂环境中自动决策的有效范式。但是,在RL中,事件驱动的决策过程的集成仍然是一个挑战。本文介绍了一种新颖的体系结构,将离散事件监督(DES)模型与标准RL框架相结合,以创建混合决策系统。我们的模型利用了DES的能力来管理基于事件的动态,而RL代理对连续状态和行动的适应性,从而促进了以连续和离散事件为特征的系统中更强大,更灵活的控制策略。DES模型与RL代理一起运行,通过基于事件的见解来增强策略的性能,而环境的状态过渡则由机械模型约束。我们通过模拟证明了方法的功效,这些模拟显示出比传统RL实现的性能指标的改进。我们的结果表明,这种综合方法对从工业自动化到智能交通系统的应用有望在离散事件处理至关重要的情况下。索引术语 - 预言学习,离散事件超级访问控制,混合系统,自主决策,事件驱动的动态
离散事件系统中的状态避免的自适应加强学习
主要关键词



相关文件推荐