机构名称:
¥ 1.0
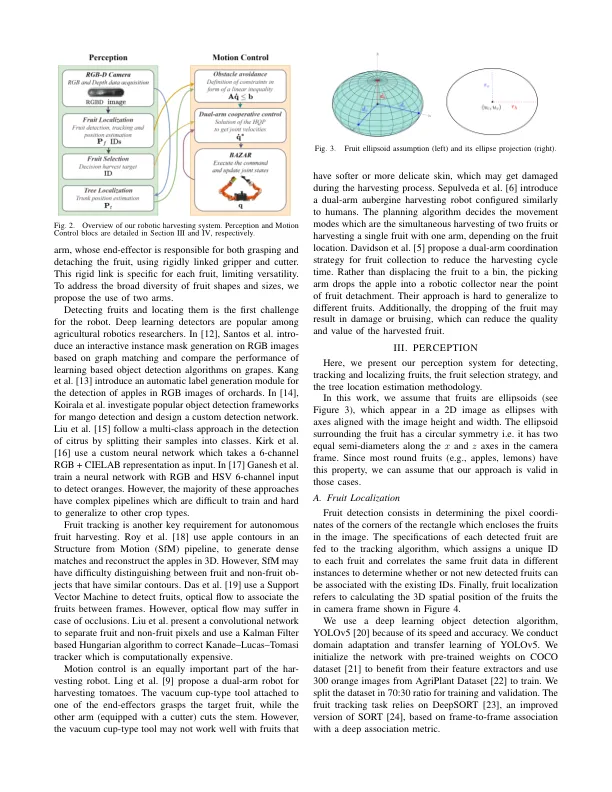
摘要 - 近年来,由于诸如提高生产力和劳动力降低等福利,对农业机器人技术的兴趣已大大增加。但是,与非结构化环境相关的当前问题使机器人收割机的发展具有挑战性。大多数农业机器人技术的研究都集中在单臂操纵上。在这里,我们提出了一种双臂方法。我们提出了配备了RGB-D相机,切割和收集工具的双臂果实收集机器人。我们利用合作任务描述来最大化双臂机器人的功能。我们设计了一个基于分层的二次编程控制策略,以实现与机器人和环境相关的一系列硬约束:机器人联合限制,机器人自我收集,机器人 - 水果和机器人树的碰撞。我们结合了深度学习和标准图像处理算法,以检测和跟踪现场的树干。我们验证了对现实世界RGB-D图像的感知方法以及对模拟实验的控制方法。
朝基于视觉的双臂机器人水果收获
主要关键词



相关文件推荐