机构名称:
¥ 1.0
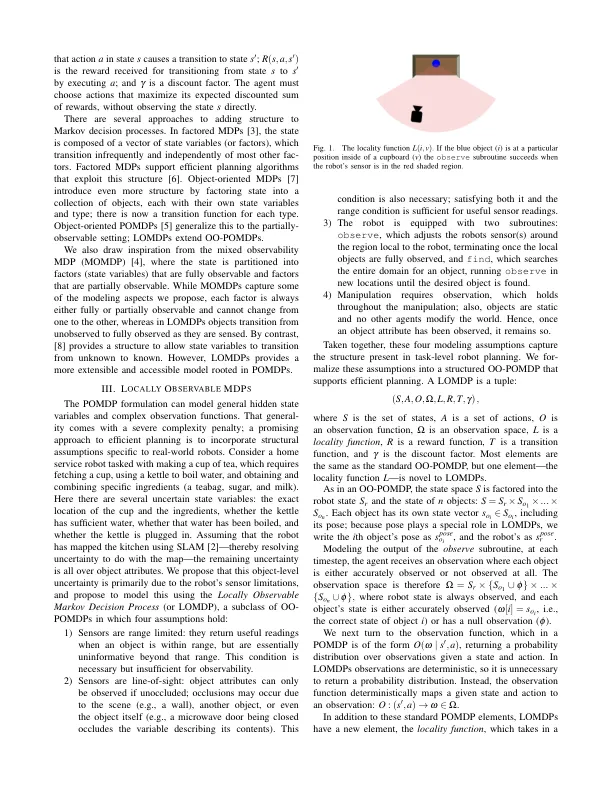
摘要 - 现实世界的机器人任务计划是由于部分观察性而棘手的。一种降低复杂性的常见方法是将其他结构引入决策过程,例如混合可特性性,货运状态或时间扩展的动作。我们提出了可观察到的马尔可夫决策过程,这是一种新颖的公式,对任务级别的计划进行建模,其中不确定性与对象级别属性有关,以及机器人具有可寻求和准确观察对象的子例程。该模拟范围限制和视线线的传感器 - 被遮挡或外部传感器范围的传感器未观察到,但是可以通过重复观察来解决落入传感器视图之内的对象的属性。我们的模型会导致一个三阶段的计划过程:首先,机器人计划仅使用观察到的对象;如果失败,它会生成一个目标对象,如果观察到,可能会导致可行的计划;最后,它试图定位和观察目标,在每个新观察到的对象之后重新掌握。通过将LOMDP与现成的Markov计划者相结合,我们在面向对象的POMDP和MDP类似物的最先进的求解器具有相同的任务规范。然后,我们将公式应用于移动机器人成功解决任务。
当地可观察性下的机器人任务计划-BROWN CS
主要关键词




相关文件推荐