机构名称:
¥ 1.0
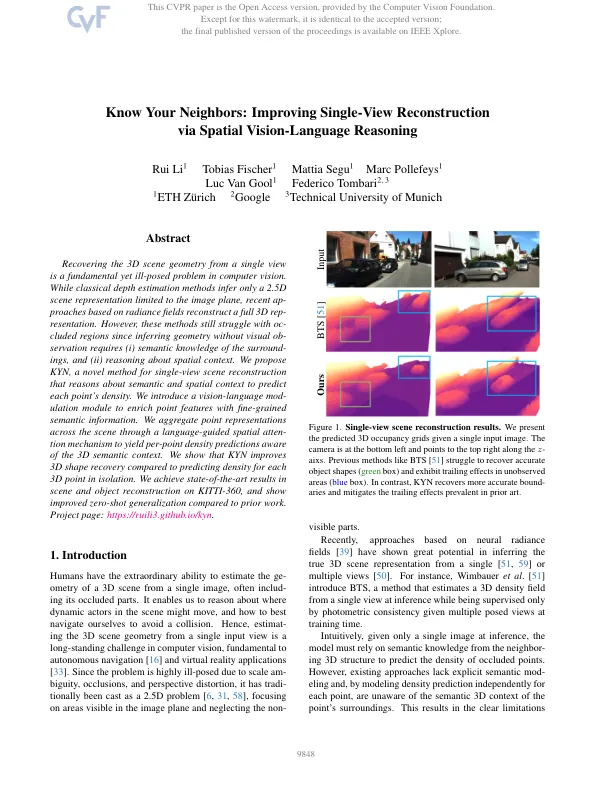
从单个视图中恢复3D场景几何形状是计算机视觉中的基本问题。虽然经典的深度估计方法仅推断出2.5D场景表示为图像平面,但最新的基于辐射范围的aperach是重建完整的3D代表。然而,这些方法仍然在被占地的区域困难,因为没有视觉观察的几何形状需要(i)周围的语义知识,以及(ii)关于空间上下文的推理。我们提出了Kyn,这是一种单视场景重建的新方法,其原因是语义和空间上下文来预测每个点的密度。我们引入了一个视觉模块模块,以使用细粒度的语义信息丰富点特征。我们通过语言引导的空间注意机制在整个场景中汇总了点表示,以产生意识到3D语义环境的每点密度预测。我们表明,与预测每个3D点的密度相比,Kyn改善了3D形状的恢复。我们在Kitti-360上实现了最新的场景和对象重建结果,并且与先前的工作相比,零弹性概括的改进。项目页面:https://ruili3.github.io/kyn。
知道您的邻居:通过空间视觉语言推理改善单视的重建
主要关键词




相关文件推荐