机构名称:
¥ 1.0
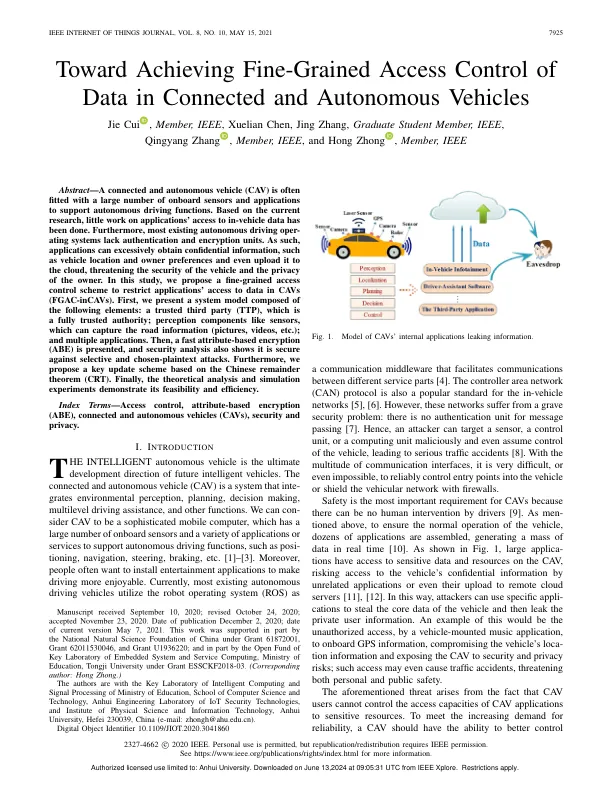
摘要 - 经常使用大量的板载传感器和应用程序,以支持自主驾驶功能。基于当前的研究,几乎没有对应用程序访问车辆内数据的工作。此外,大多数现有的自动驾驶操作系统都缺乏身份验证和加密单位。因此,申请可以过多地获取一致的信息,例如车辆位置和所有者偏好,甚至将其上传到云中,威胁到车辆的安全性和所有者的隐私。在这项研究中,我们提出了一种细粒度的访问控制方案,以限制应用程序对CAVS(FGAC-INCAVS)中数据的访问。首先,我们提出了一个由以下要素组成的系统模型:受信任的第三方(TTP),这是完全值得信赖的权威;感知组件(例如传感器),可以捕获道路信息(图片,视频等)。);和多个应用程序。然后,提出了一个基于快速属性的加密(ABE),安全分析还表明,它可以防止选择性和选择性攻击。此外,我们提出了一个基于中文剩余定理(CRT)的关键更新方案。最后,理论分析和仿真实验证明了其可行性和效率。
旨在实现连接和自动驾驶汽车中数据的细粒度访问控制
主要关键词

相关文件推荐