机构名称:
¥ 1.0
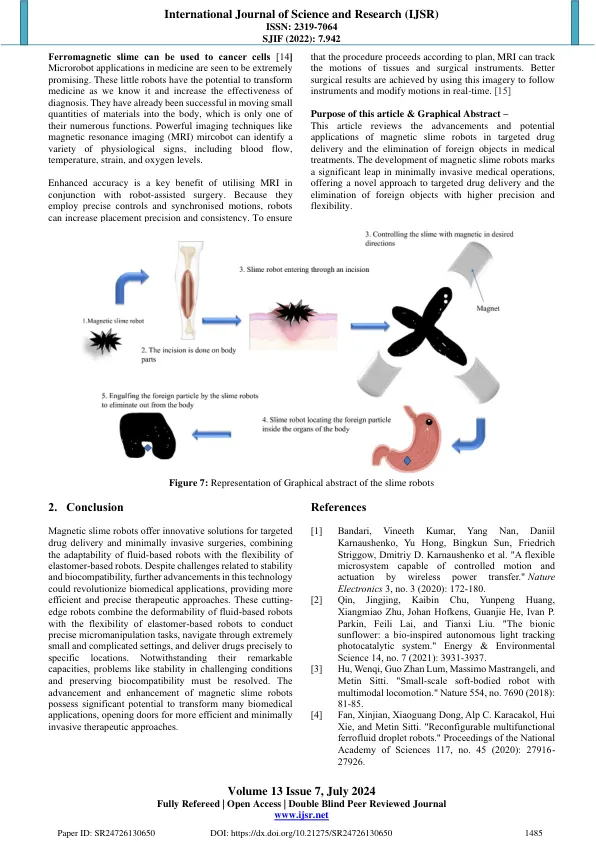
摘要:磁性小型软体机器人非常适合有针对性的药物管理、微操作和微创手术,因为它们可以非侵入性地进入狭窄的位置。目前可用的磁力操作小型软机器人基于弹性体(硅胶)和流体磁流体或液态金属,但它们有缺点。以弹性体为基础的机器人难以变形,这使得它们在极其狭窄的空间内难以操纵。虽然它们可能更容易变形,但基于流体的机器人形态不稳定,环境适应能力有限。本研究展示的非牛顿流体磁驱动粘液机器人结合了流体机器人显著的变形能力和弹性体机器人的灵活性。这些粘液机器人可以在复杂环境中的不同表面上移动,并通过直径小至 1.5 毫米的微小通道导航。它们执行的任务包括运输、摄取和抓取固体物品。磁性粘液机器人结合了非牛顿流体和弹性体的特性,为靶向药物输送和微创手术提供了有希望的解决方案。这些机器人可以在狭小而复杂的环境中移动,执行运输、摄取和抓取固体物体等任务,并适应各种表面。本综述讨论了磁性粘液机器人的设计、制备和应用,强调了它们在稳定性和生物相容性方面面临挑战的情况下,在彻底改变生物医学操作方面的潜力。关键词:粘液磁机器人,非牛顿流体,靶向药物输送系统,弹性体,磁流体,个性化医疗 1.简介 体积小且对外界信号有反应的机器人更加用户友好且侵入性更小,[1] 使其成为生物医学应用 [2] 的激动人心的候选者,例如具有微创手术和细胞移植的靶向药物输送系统。对于小型机器人控制,外部磁场是一种潜在的解决方案,因为它安全、准确且反应时间快。软弹性体与硬磁颗粒相结合用于制造大多数磁驱动软体机器人。
磁性粘液机器人:药物靶向和异物清除方面的创新
主要关键词




相关文件推荐