机构名称:
¥ 1.0
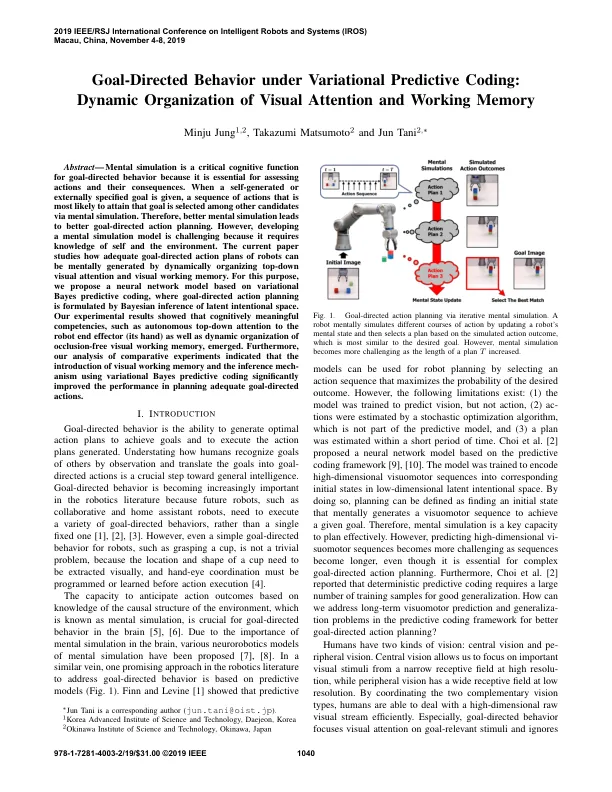
摘要 — 心理模拟是目标导向行为的关键认知功能,因为它对于评估行为及其后果至关重要。当给定一个自我生成或外部指定的目标时,通过心理模拟从其他候选中选择最有可能实现该目标的一系列动作。因此,更好的心理模拟会带来更好的目标导向行动计划。然而,开发心理模拟模型具有挑战性,因为它需要了解自我和环境。本文研究了如何通过动态组织自上而下的视觉注意力和视觉工作记忆来在心理上生成机器人的充分目标导向行动计划。为此,我们提出了一种基于变分贝叶斯预测编码的神经网络模型,其中目标导向行动计划由潜在意向空间的贝叶斯推理制定。我们的实验结果表明,出现了具有认知意义的能力,例如对机器人末端执行器(手)的自上而下的自主注意以及无遮挡视觉工作记忆的动态组织。此外,我们对比较实验的分析表明,引入视觉工作记忆和使用变分贝叶斯预测编码的推理机制显著提高了规划充分的目标导向行动的表现。
变分预测编码下的目标导向行为
主要关键词




相关文件推荐